目标检测方法解析:R-CNN、YOLO与SSD
"该资源是一个关于目标检测方法的PPT概述,涵盖了从基础概念到具体算法的详细介绍,包括R-CNN、YOLO和SSD。适合初学者了解和深入理解目标检测领域。"
目标检测是计算机视觉中的关键任务,旨在识别图像中的特定对象并定位它们的位置,通常通过边界框表示。近年来,目标检测技术取得了显著进步,主要分为两类算法:两阶段方法(如R-CNN系列)和一阶段方法(如YOLO和SSD)。
1. R-CNN(Region-based Convolutional Neural Network)系列:
R-CNN是两阶段方法的代表,首先通过Selective Search等区域提议算法生成可能包含目标的候选框,然后对每个候选框进行CNN特征提取和分类。R-CNN的后续改进包括Fast R-CNN和Faster R-CNN,分别通过共享卷积层计算和引入区域 Proposal 网络提升了速度和效率。
2. YOLO(You Only Look Once):
YOLO是一阶段目标检测算法的典范,它摒弃了区域提议步骤,直接在全图上进行预测。YOLO将图像分成网格,并且每个网格负责预测固定数量的边界框,同时估计每个框的类别概率。这种方法速度快,但可能对小目标检测和密集排列物体的定位能力较弱。
3. SSD(Single Shot MultiBox Detector):
SSD同样是一阶段方法,它结合了多尺度特征检测,能够在单一网络中同时预测边界框和类别,提高了检测速度,同时保持了较高的准确性。SSD通过不同大小和形状的锚点(anchor boxes)来处理不同尺寸的目标,改善了对不同大小物体的检测性能。
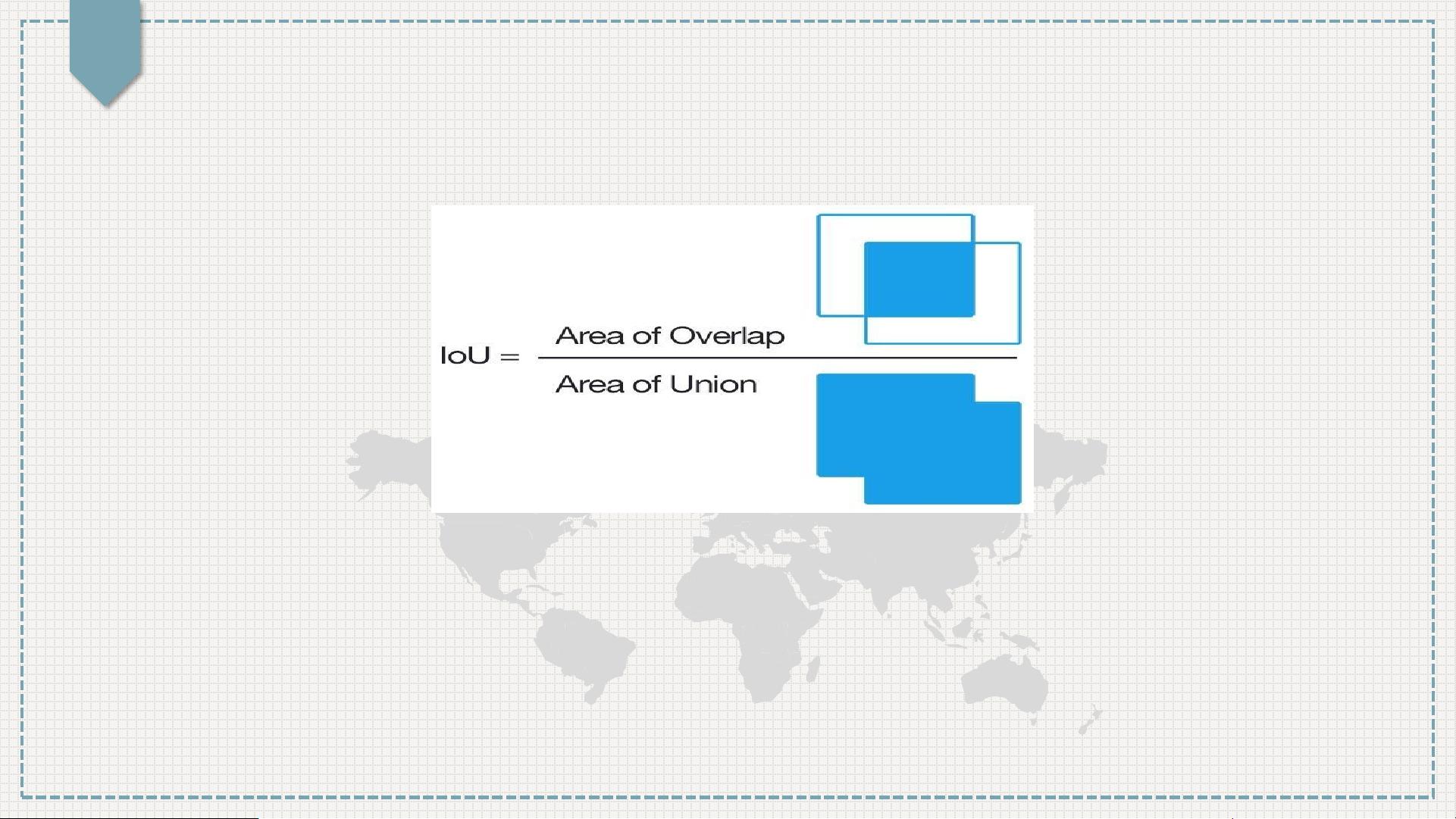
评价目标检测算法性能的关键指标是平均精度均值(mAP),它基于精确率和召回率。精确率是指正确检测出的正样本占所有被预测为正样本的比例,召回率则是正确检测出的正样本占所有实际正样本的比例。IoU(Intersection over Union)用于计算预测边界框与真实边界框的重叠程度,是评估边界框定位精度的重要工具。mAP是多个类别的AP的平均值,用于综合评估算法的整体性能。
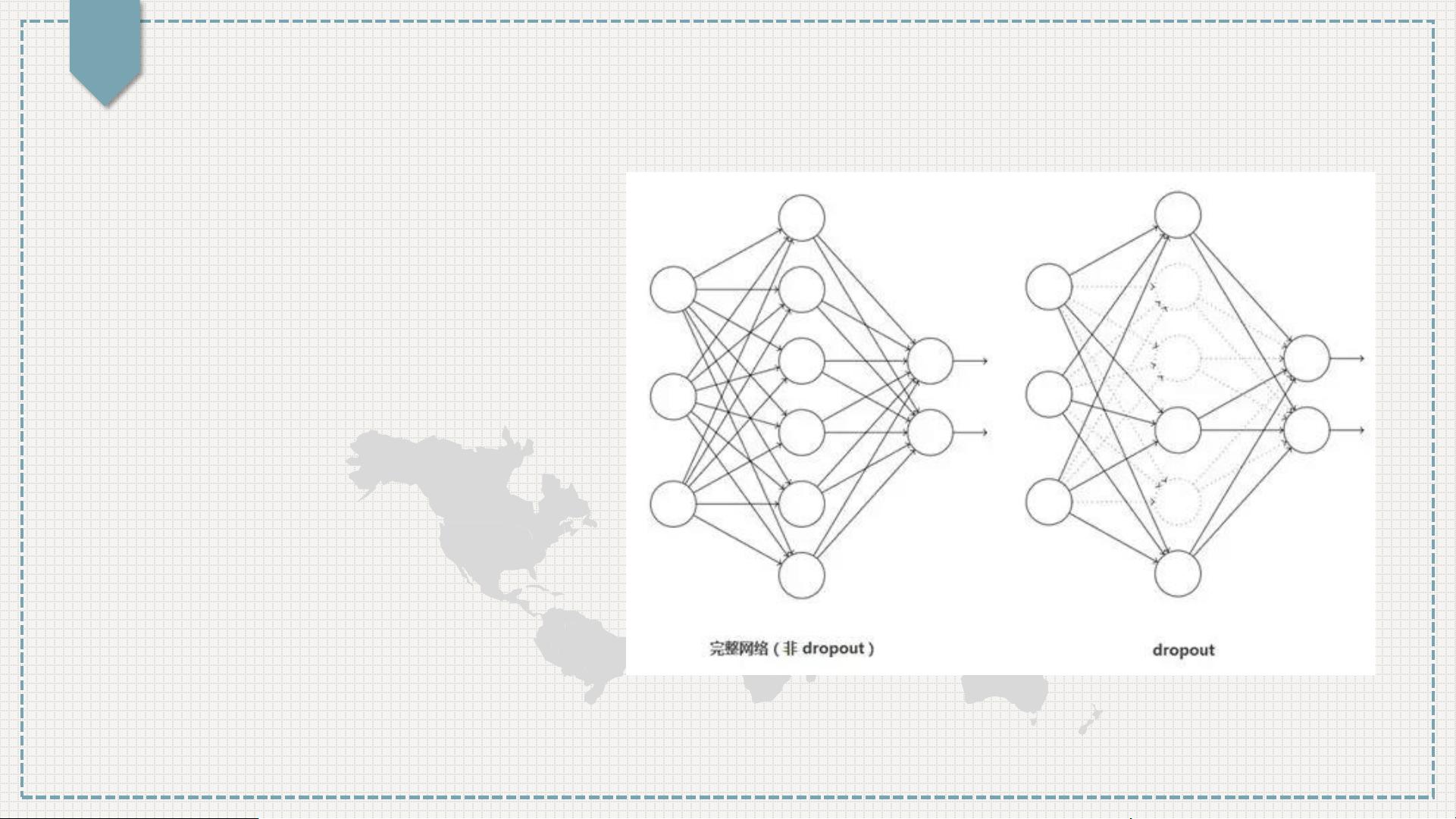
此外,dropout是一种防止过拟合的技术,它在训练过程中随机关闭一部分神经元,强制网络学习更多冗余特征,提高泛化能力。在目标检测模型的训练中,dropout也可以帮助提高模型的稳定性和泛化性能。
该PPT提供了目标检测领域的全面概述,从基本概念到具体算法,包括R-CNN系列、YOLO和SSD的详细解释,以及性能评估标准和优化技术,对于学习和研究目标检测具有很高的参考价值。

270 浏览量
2021-11-15 上传
2021-08-08 上传
244 浏览量
132 浏览量
2021-11-02 上传
725 浏览量

恩泽君
- 粉丝: 186
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- MSADS_Portfolio
- Arduino-FOC:用于BLDC和步进电机的Arduino FOC-基于Arduino的磁场定向控制算法库
- TestePraticoDDD:使用受DDD(域驱动设计)实践支配的结构测试项目
- react-number-format:React组件以将数字格式化为输入形式或文本形式
- 鼠标经过图片显示文字介绍代码
- 蓝色简洁企业介绍品牌宣传PPT模板
- DETR.detectron2:基于detectron2的DETR实现
- Algorithm-GoogleCodeJam-2015.zip
- StepperDriver:用于A4988,DRV8825,DRV8834,DRV8880和通用两针(DIRSTEP)步进电机驱动器的Arduino库
- RxAnimatedCarthageExample
- 逗比测试HTML5游戏源码
- HTextView:动画效果为文本,不是真正的textview
- Flarum - PHP编写的漂亮、优雅、简洁的轻论坛.zip
- 噪音控制技术.zip
- HTML5实现的全屏图片展示效果
- Web开发问题
