家庭智能服务机器人:高精度建图与人体姿势监测
需积分: 0 178 浏览量
更新于2024-06-30
收藏 17.93MB DOCX 举报
"1505170106-文岩-家庭智能服务机器人的设计1"
家庭智能服务机器人是科技进步与社会需求相结合的产物,尤其在老龄化加剧和社会服务系统亟待完善的背景下,其重要性日益凸显。设计一款具备高精度地图构建、室内定位导航、人体姿势监测以及全方位环境感知的多功能机器人,旨在提高家庭生活质量,保障安全,并为老年人和儿童提供特别关怀。
本设计中,机器人核心功能包括:
1. 高精度室内建图:采用国产低成本高性能激光雷达,结合最新的SLAM(Simultaneous Localization and Mapping,同步定位与建图)算法,能够快速准确地构建室内环境三维地图。SLAM技术是服务机器人自主移动的关键,它允许机器人在未知环境中实时定位并创建地图,为后续的导航任务奠定基础。
2. 室内定位与导航:导航是机器人在家庭环境中执行任务的基础。通过融合多传感器信息,如激光雷达、超声波传感器等,机器人能够实现室内自主导航,避免障碍物,确保安全移动。
3. 姿势监测:利用NVIDIA Jetson TX2的强大计算能力和Kinect摄像头的深度图像捕捉能力,机器人可以对人体姿态进行实时监测。这一功能对于监护老人和儿童的安全尤其重要,例如,可以及时发现跌倒或其他潜在危险情况。
4. 环境感知与警报:机器人配备了多种环境传感器,如烟雾传感器、天然气传感器、空气质量传感器、光照传感器和温湿度传感器,可以实时监测室内环境参数。此外,集成的文本转语音模块和esp8266模块使得机器人能将检测结果以语音形式播报,提供直观的信息反馈,并通过网络连接发送警告或通知用户。
家庭服务机器人的研发不仅有助于解决社会问题,提高生活质量,还推动了人工智能、嵌入式系统和传感器技术的创新。随着技术的不断进步,未来的家庭智能服务机器人将会更加智能、人性化,成为家庭生活中的得力助手。
家庭智能服务机器人的设计
6
3 家庭智能服务机器人自主导航功能的硬件设计
3.1 自主导航功能下位机硬件设计
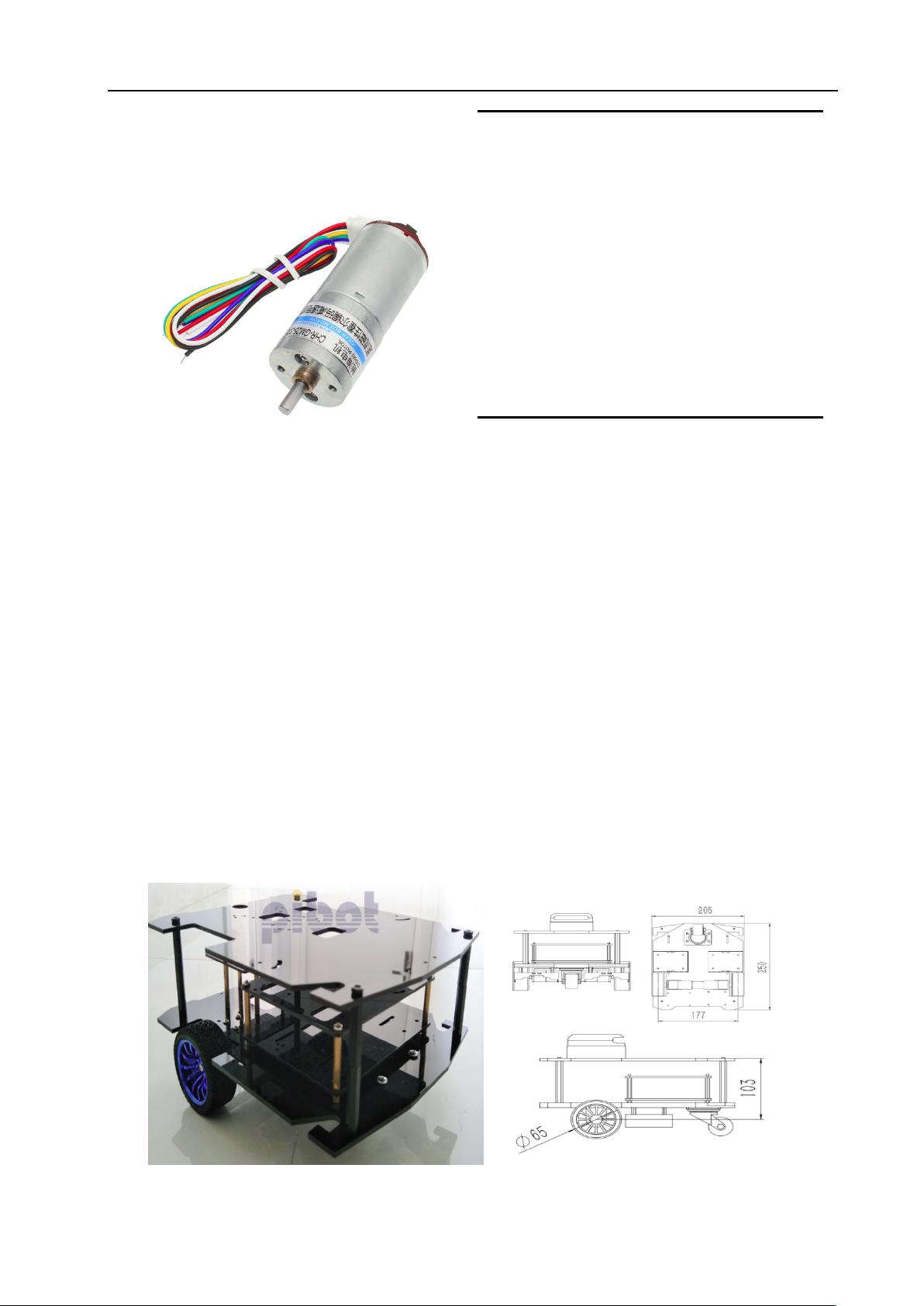
3.1.1 机器人底盘设计
考虑到室内环境下使用,机身尺寸不宜太大,也不能太小。同时,在设计之初,就预
料到会有非常多的电子元器件和线材需要安装在机器人身上,所以封闭式的机身固然好看,
但是封闭式的结构的加工主要有三种途径:1.开模具;2.3D 打印;3.找类似能用的已有产
品的外壳代用。开模具的成本无法估计而且时间长,3D 打印外壳不光滑而且速度慢,找
已有产品外壳代替后期的设计会非常被动,可能很多地方都会被原有的结构设计打乱现有
的设计。同时考虑到作为处女座初试同时毕设时间又非常紧迫,决定以开放式的堆叠结构
作为主要结构。
接下来就是确定行进驱动的问题。首先双足或多足形式步态算法复杂且稳定性很难做
的很好,而且噪音大功耗高,不在考虑之列;其次麦克纳姆轮和瑞士轮由于价格较高且完
全没必要使用,不在考虑之列;因为普通橡胶轮价格便宜而且完全满足使用要求,所以选
择橡胶轮。
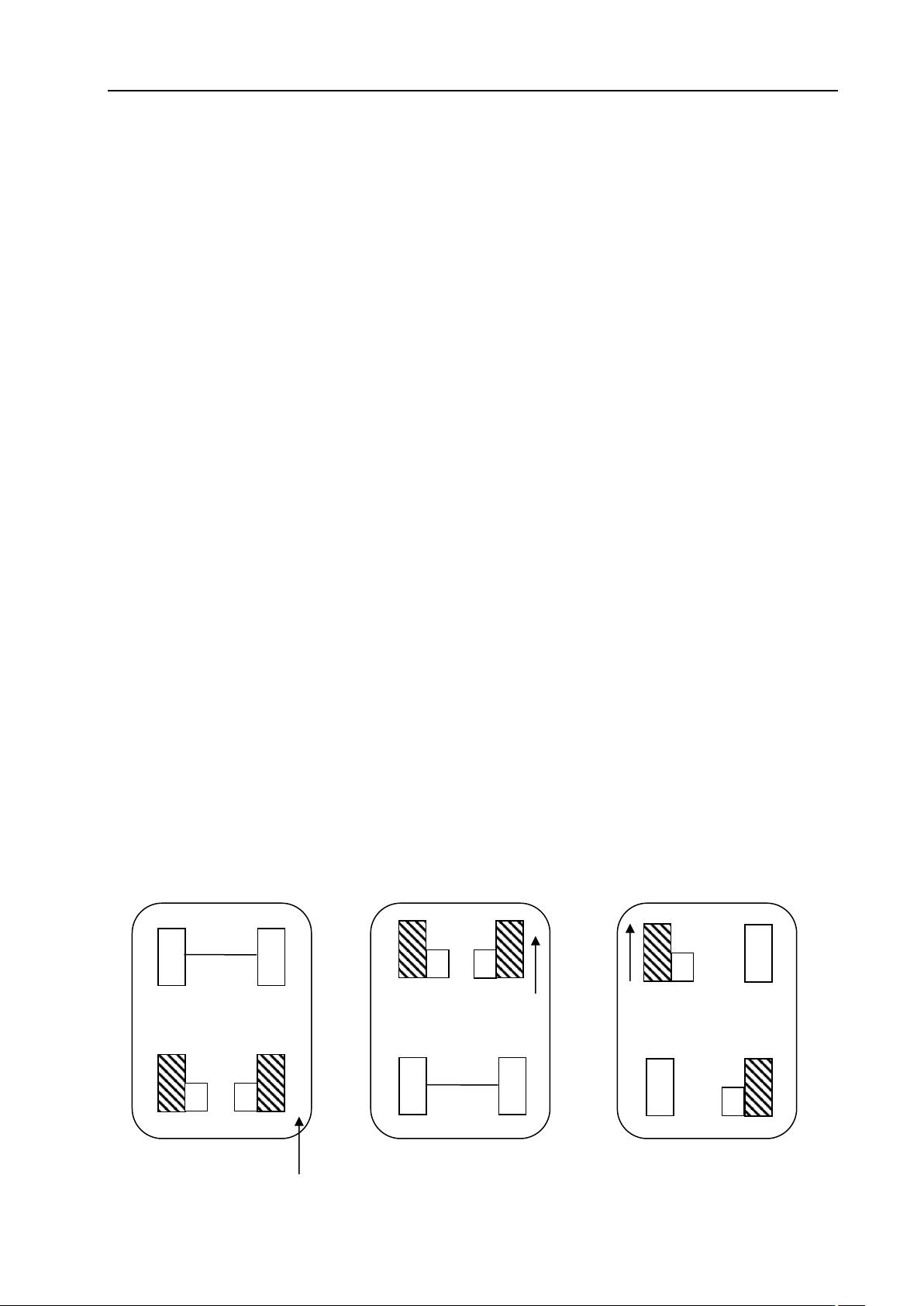
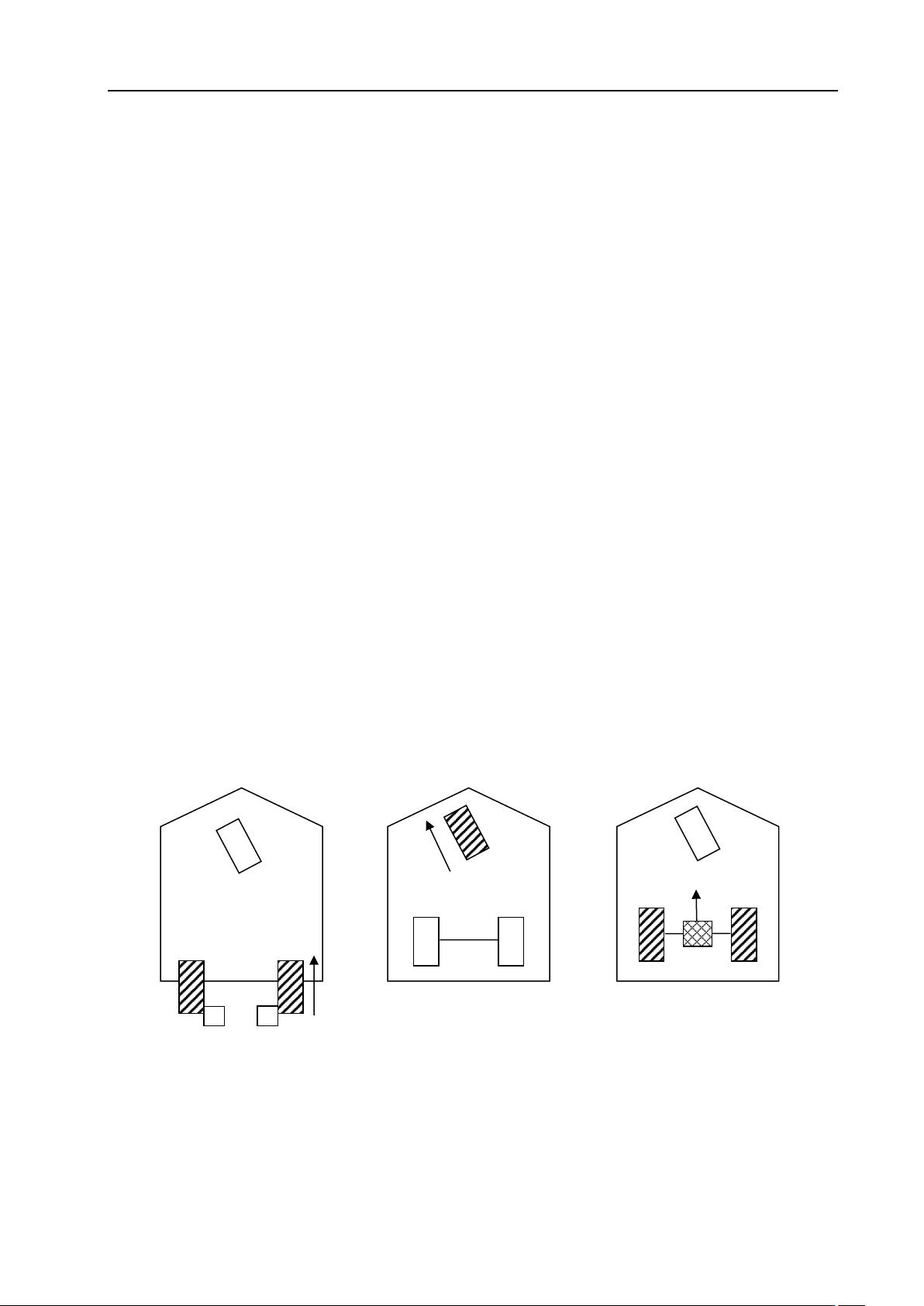
橡胶轮底盘主要有四轮底盘和三轮底盘。四轮底盘稳定性好,三轮底盘稳定性差但转
向灵活、控制方便。首先我们来看一下四轮底盘的几种不同的形式。
剩余98页未读,继续阅读
266 浏览量
2024-06-18 上传
点击了解资源详情
147 浏览量
2025-01-08 上传
2025-01-08 上传

江水流春去
- 粉丝: 50
- 资源: 352
 我的内容管理
展开
我的内容管理
展开







最新资源
- Lista_de_Exercicios:Lista deExercíciode Algoritmos do Gustavo Guanabara教授
- rust-cas:通过构建与Bazel兼容的内容可寻址商店来测试Rust
- 网络刀客 v3.0
- TW-Shiraz:Shiraz是Tiddlywiki 5的一个小型插件,包含宏,样式表,模板,片段,图像,静态表,动态表,并充当入门工具包
- vc_static_button.rar_RFW_VC static Button_VC++ static Button
- 行业文档-设计装置-一种折叠式太阳能座椅广告棚.zip
- pid控制器代码matlab-Ziegler-Nichols-Tuning-Method:使用Ziegler-Nichols闭环方法针对给定传
- CompletableFuture.zip
- 纯css制作文字随时间变动而变色,文字变色效果,背景透明阴影
- up4
- Curriculum_Vitae:职务経歴书
- 粒子群多目标-程序.rar_UY9_pareto_pareto多目标_多目标 粒子群_自适应粒子群
- 行业文档-设计装置-一种折纸机的机头.zip
- englishTeachers:使用Postgresql的简单应用
- SSM实验室预约管理系统.7z
- ESP8266-01GPIO口模拟I2C LCD1602.rar
