"入门级TMS320C2000电机控制技术及工具介绍"
需积分: 28 163 浏览量
更新于2024-03-12
收藏 1.28MB PDF 举报
TMS320C2000 Motor Control Primer《TMS320C2000电机控制技术入门》是一份专门为高性能驱动应用设计的用户指南。在这个指南中,介绍了一些入门级的数字电机控制方法和实验室工具,旨在帮助工程师学习如何构建快速、可靠和强大的控制系统。这些工具包括德州仪器提供的设备驱动程序、API、实用程序和库,以及电机控制开发工具包、软件框架和DMC库。这些文档采用模块化的开发策略,使用户可以逐步从基础级别向高级级别进行试验。
现如今,高性能驱动应用越来越受到关注,因此对配备良好的数字电机控制平台的需求也在不断增加。只有通过有效的教育和培训,我们才能培养出下一代工程师,他们具备掌握先进控制技术的能力。因此,《TMS320C2000电机控制技术入门》扮演着重要的角色,为工程师提供了一种学习数字电机控制的有效途径。
在这份用户指南中,我们介绍了一系列初级数字电机控制方法和实验室工具,这些工具可以帮助工程师轻松学习如何构建快速、可靠和强大的控制系统。TI提供的设备驱动程序、API、实用程序和库,以及电机控制开发工具包、软件框架和DMC库,都是非常有用的资源。通过这些工具,工程师可以逐步提升自己的技能水平,从基础级别到高级级别进行试验和学习。
电机控制开发工具包、软件框架和DMC库为工程师提供了丰富的资源,可以满足不同项目需求。用户可以根据自己的实际情况选择合适的工具和库,从而更好地应用数字电机控制技术。这种模块化的开发策略使用户能够更好地了解和掌握控制系统的各个方面,为他们未来的工作打下坚实的基础。
总的来说,《TMS320C2000电机控制技术入门》为工程师提供了一种有效的学习和实践途径,帮助他们掌握数字电机控制的技术和方法。通过介绍不同的控制方法和工具,这份指南为工程师提供了丰富的资源,让他们能够更好地应用数字电机控制技术,从而提升自己的技能水平。希望通过这份指南,工程师们能够在数字电机控制领域取得更大的成就,为未来的工程发展贡献自己的力量。
TMS320C2000 Motor Control Primer
6
Software Modularity
The benefits of structured, modular software are well known. This is especially true for large, complex systems with
many sub-blocks contributed by many individuals. In these cases, there is a strong common set of needs. Efforts by
contributors should only be used one time, and are reusable for future projects. The contributed software blocks
(modules) must be predictable in their behavior and compatible with other blocks, both functionally and numerically.
Industry has learned the benefits of these methodologies, and has realized the impact they can make on smoother
system integration; reducing debug and troubleshooting time, providing a higher degree of visibility inside the
software, and allowing quicker system reconfiguration. These attributes have significant impact on getting quality
products out to market in a timely manner.
Such methodologies needed to be applied to high-performance motor control systems and to address this, TI
introduced the modular DMC library in early 2000. Within the digital control systems space, the algorithm standard
has been used to address the specific needs of application areas such as digital motor control, industrial electronics,
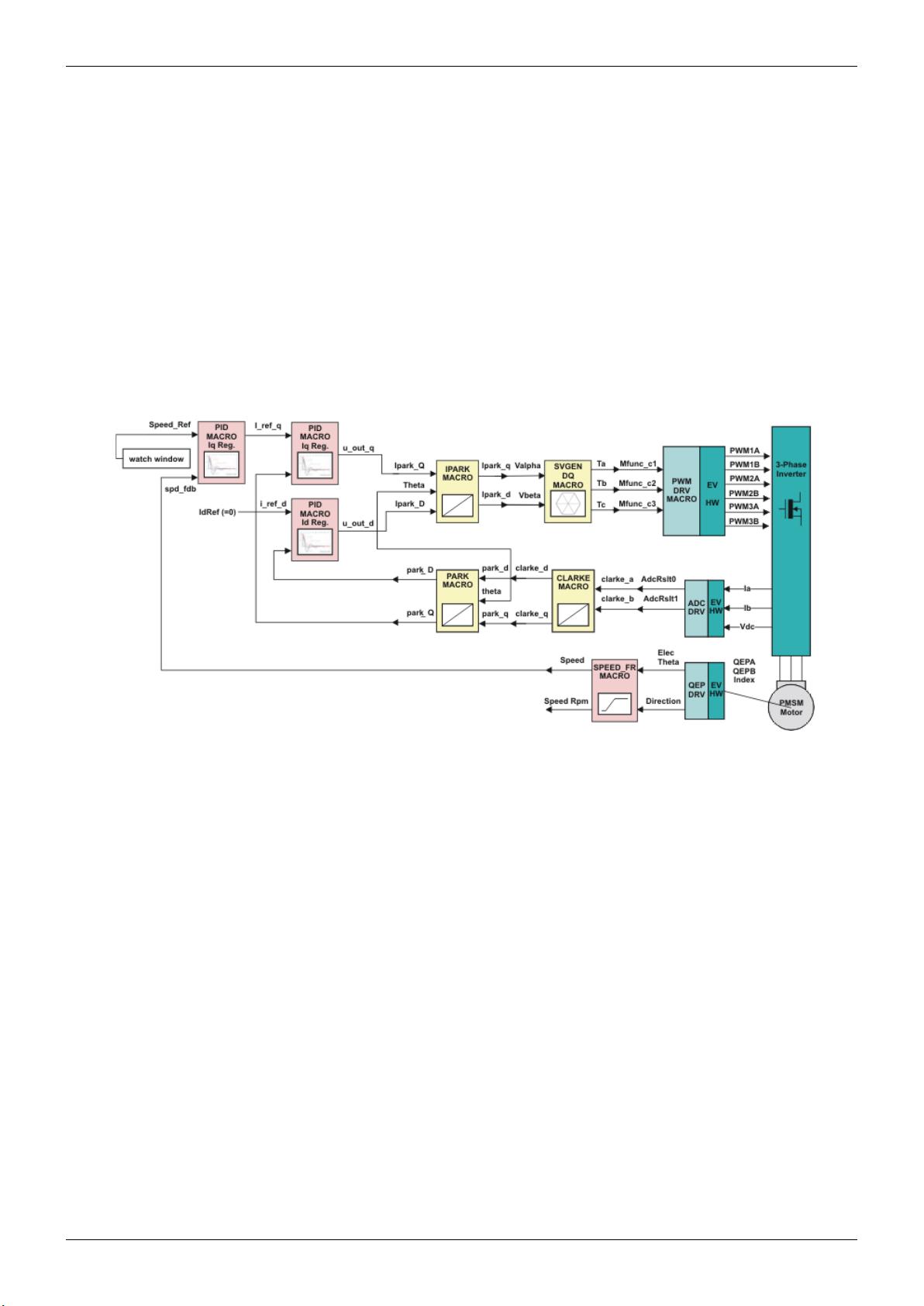
uninterruptible power supplies, plus a host of other control-related areas. The familiar signal flow block diagram
representation of digital control systems, as seen in control texts and university publications, lend themselves well to
effective implementation by software-interconnected module blocks (i.e., functions or macros) with well-defined
input and output ports.
Once a rich set of library modules is available with a well-defined and proven interconnect methodology, systems
can be realized fairly quickly. The logical extension is that various “what-if” scenarios of system topologies and/or
configurations can be explored relatively easily and with little overhead. As a more basic or fundamental need, this
same ease of module connection allows a system designer to have a number of incremental build levels, ranging
from a rudimentary system (3-4 modules) used to check out key life signs, to a fully featured final system with a
large number of connected modules. This is analogous to the commissioning steps or process which is typical in
large engineering projects. This approach to system software commissioning is invaluable during the system
integration phase and can greatly reduce the time and effort required.
Consistency Between Software Modules and Control Block Diagrams
It is well known that systems and control engineers like to visualize systems or control strategies in the form of
signal flow block diagrams. It makes good sense to separate main functions and to show how each is interrelated by
explicit connection to other functions. Each function should be self-contained, and its boundaries or interface clearly
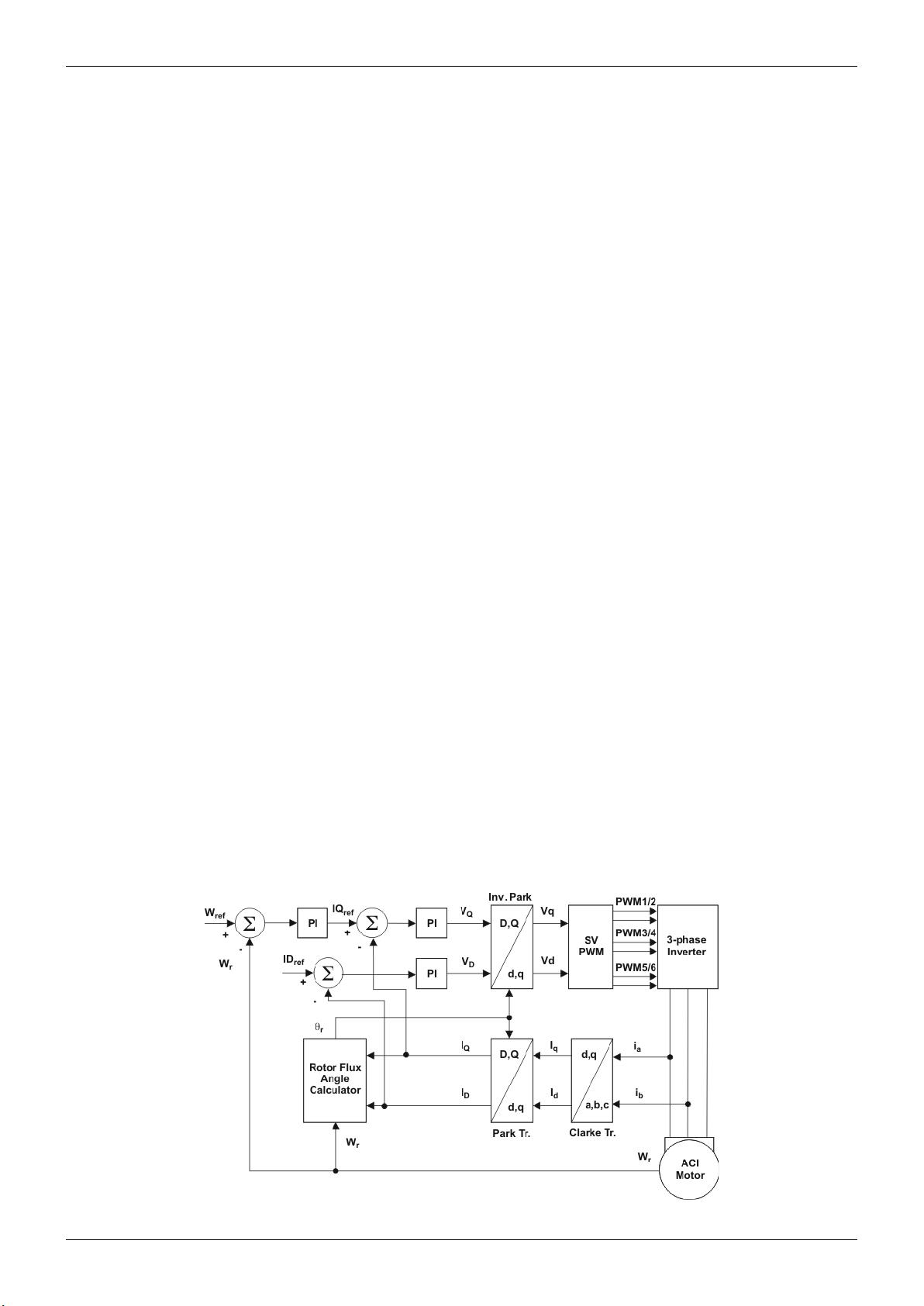
delineated. A digital motor control system is a good example of this interrelation of functions. Figure 2 shows a
typical signal flow block diagram of an AC induction motor controlled by a field-oriented control strategy. This is a
useful representation, and it is found in many classical texts on motor control. However, several limitations are
evident when attempting to realize this diagram in software form.
Figure 2. ACI Sensored FOC -System Block Diagram
剩余32页未读,继续阅读
2010-11-04 上传
2022-09-19 上传
2022-09-14 上传
2010-12-20 上传
2010-12-20 上传
2009-10-28 上传









