自动驾驶:应对环境变化的位置识别技术与潜力
132 浏览量
更新于2024-06-20
收藏 2.05MB PDF 举报
" 本文探讨了自动驾驶中位置识别技术的重要性及其面临的挑战,特别是环境变化对识别准确性的影响。文章提出了一个新的时间门控图像匹配技术,该技术基于隐马尔可夫模型,能够在不断增长的数据集中进行有效重训练和压缩,以适应环境变化。此方法旨在解决大规模地点识别的问题,尤其是在自动驾驶的本地化和环路闭合检测中。
1. 地点识别(PR)在自动驾驶中的作用
PR是自动驾驶系统的关键组成部分,负责车辆的定位和姿态估计,同时也是环路闭合检测的重要一环。当前的先进PR方法依赖于大量带有精确地理位置标签的样本图像进行训练,并利用学习方法提高识别精度。
2. 对环境变化的适应性需求
鲁棒的PR算法需要应对频繁的短期变化(如天气、光照)和长期变化(如季节性变化、植被生长)。此外,还需处理城市环境中如交通流量和临时交通规则变化导致的不规则外观变化。
3. 固有鲁棒性和大数据集策略
一种策略是设计对变化具有内在鲁棒性的PR算法,提取地方的“视觉本质”;另一种策略是利用覆盖多种环境条件的大规模图像数据集来训练算法,以适应外观的长期演变。后者需要持续的数据积累和算法更新。
4. 提出的时间门控图像匹配技术
文章提出的新方法利用隐马尔可夫模型,能够在数据集扩大时进行高效重训练和压缩,确保新查询的识别能利用所有可用数据,同时避免计算成本显著增加。这种方法在实验中显示出了优于现有技术的潜力。
5. 应用与未来方向
通过服务车辆车队收集数据,可以在广阔区域内实现连续且成本效益高的数据获取,从而支持提出的PR技术的应用。未来的研究可能会进一步优化这种技术,提高其在复杂环境中的性能,以推动自动驾驶技术的发展。
自动驾驶的位置识别技术是解决车辆定位和导航的关键,而提出的基于时间门控图像匹配的技术有望增强系统的环境适应性,提升自动驾驶的安全性和可靠性。
9321
匹配
匹配
转移矩阵
(一)
0.4
0.2
0
0.4
0.2
0
0 200 400 600
(b)第(1)款
转移矩阵
(c)第(1)款
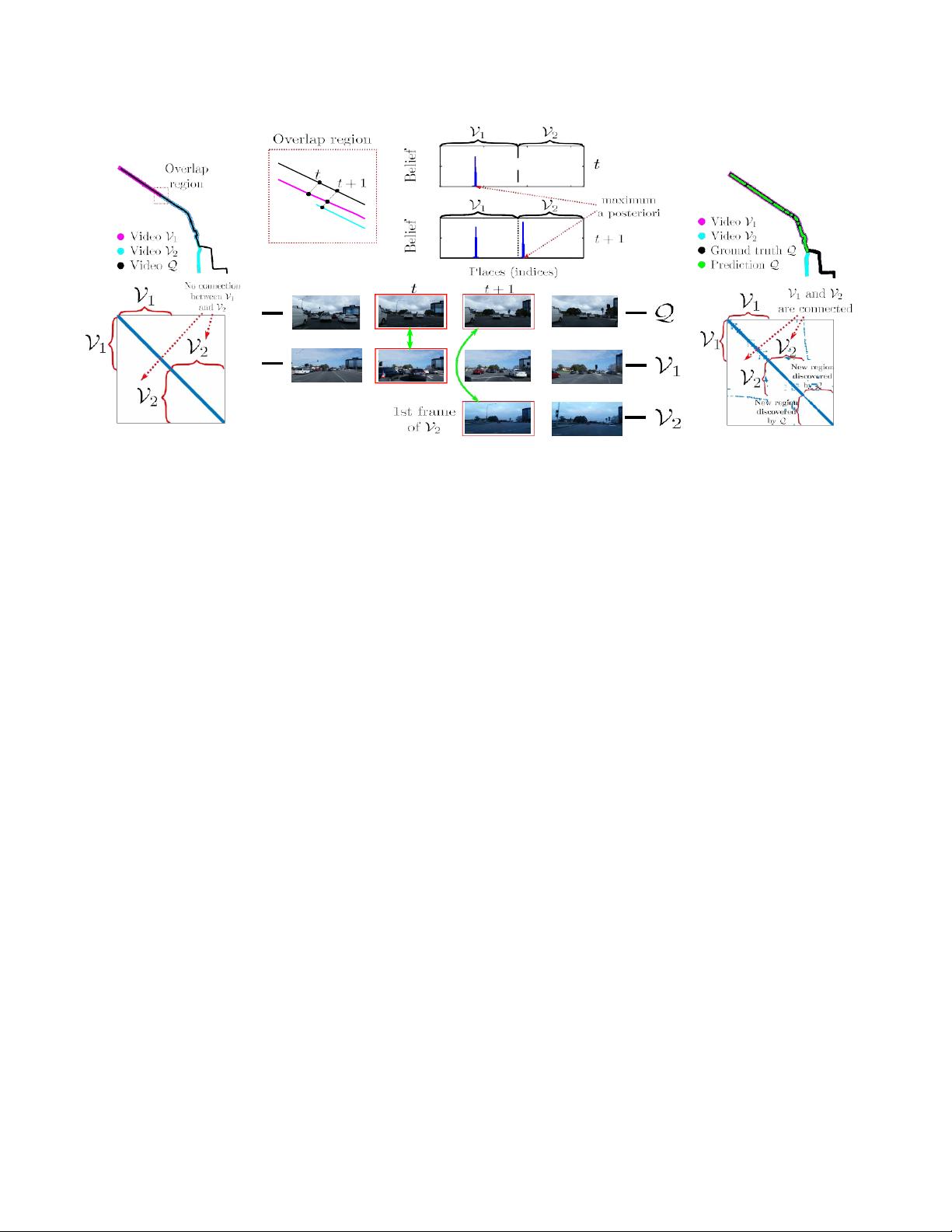
图1:我们使用HMM进行位置识别的想法概述。考虑数据集D
=
{V
1
,
V
2
}和查询Q。 图1a:由于
V1
和
V2
是在不同的环
境条件下记录的,
V2
无法与
V1
匹配,因此
V1
和
V2
之间没有联系。查询
Q
访问由
V1
和
V2
覆盖的地方,然后访问一个未知
的地方.图1b:查询Q首先仅针对
V1
本地化。当其在时间t + 1处到达“重叠区域”时在每个时间步长t处对应于MaxAP
的图像被返回作为匹配结果。图1c:阈值
决定是否应该接受匹配结果
,
因此当
Q
是看不见
的
地方时,
V1
和
V2
的
MaxAP
很小,
我们不确定匹配结果。 一旦Q完成,Q发现的新地点将被添加到地图中以扩大
覆盖区域。
此外
,由
于
Q
与
V
1
和
V
2
都匹配,因此我们可以连接
V
1
和
V
2
。
hicle也受到交通方向的限制。因此,相机的姿态变化
相对较低[35,32]。
以 上 激 励我们将道 路 网 络 表 示 为 图
G
=
(
N
,
E
),我们也称之为节点的集合
N
简单地是
D
中的所
有图像的集合。为了减少混乱,我们
N
=
{1
,
. . .
,
K}
,
⑷
Σ
M
通过在不同地点之间转换的概率,即,
w
(
k
1
,
k
2
)
=
P
(
k
2
|
k
1
)
=
P
(
k
1
|
k
2
)
,
(
7
)
对于穿越道路网的车辆。简单地说
‖
k
1
,
k
2
‖∈
/
E
i f f
P
(
k
2
|
k
1
)
=
P
(
k
1
|
k
2
)
=
0
.
(八
)
从(7)中也可以清楚地看出,
G
是无向的。转移概率
的具体定义将在第2节中给出。5.第一,Sec。4讨论了
给定
D
和映射
Q
其中K
=
i
=1
N
i
是图像的总数我们
把一个索引k
∈ N
称为地图上的一个
我们还维护了一个语料库C,它存储了在每个地方
观察到的图像。目前,语料库只包含
C(k)
=
{1
k
}
,
k
=
1
,
. . .
,
K
,
(
5
)
在每个单元格
C
(k)处。在第5,我们将随着视频数
据集
D
的增长而递增地将图像附加到
C
。
在
G
中,边缘集合
E
连接在其FOV中重叠的图像,
即,是
E
中的一条边,如果
I
∈ C
(
k1
)
和
(六)
请注意,两个图像可以重叠,即使它们来自不同的视频
和/或条件。边被加权
0
200
400
600
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-20 上传
2022-11-19 上传
2022-11-10 上传
2022-07-11 上传
2022-06-12 上传
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- faboosh.github.io
- libceres.a.zip
- MH-Ripper-开源
- react-hooks-ts:挂钩的Uniãodos conceitos no React com打字稿
- 基于DeepSORT算法实现端到端的行人多目标跟踪
- java版商城源码-cosc410-project-fa20:cosc410-项目-fa20
- DMIA_Base_2019_Autumn
- 7DaysofCodeChallenge:7天代码挑战以完成ALC学习
- GenCode128-Code128条码生成器
- c04-ch5-exercices-homer-crypto:c04-ch5-exercices-homer-crypto由GitHub Classroom创建
- ch_dart
- java版商城源码-Machi-Koro-Digitization:Machi-Koro-数字化
- LarryMP3Player-开源
- Android R(Android11) Android.bp语法参考文档
- Comic-Core:漫画收藏管理
- c#MVC EF+Easyui项目.zip
