自动驾驶仿真技术深度解析与测试策略
版权申诉
"自动驾驶仿真技术详解 适合仿真测试系统开发与测试执行工程师参考"
自动驾驶仿真技术是当前汽车工业和人工智能领域的重要研究方向,它通过模拟真实世界中的驾驶环境,为自动驾驶系统的开发和测试提供安全、高效的平台。本文档详细探讨了这一领域的关键知识点。
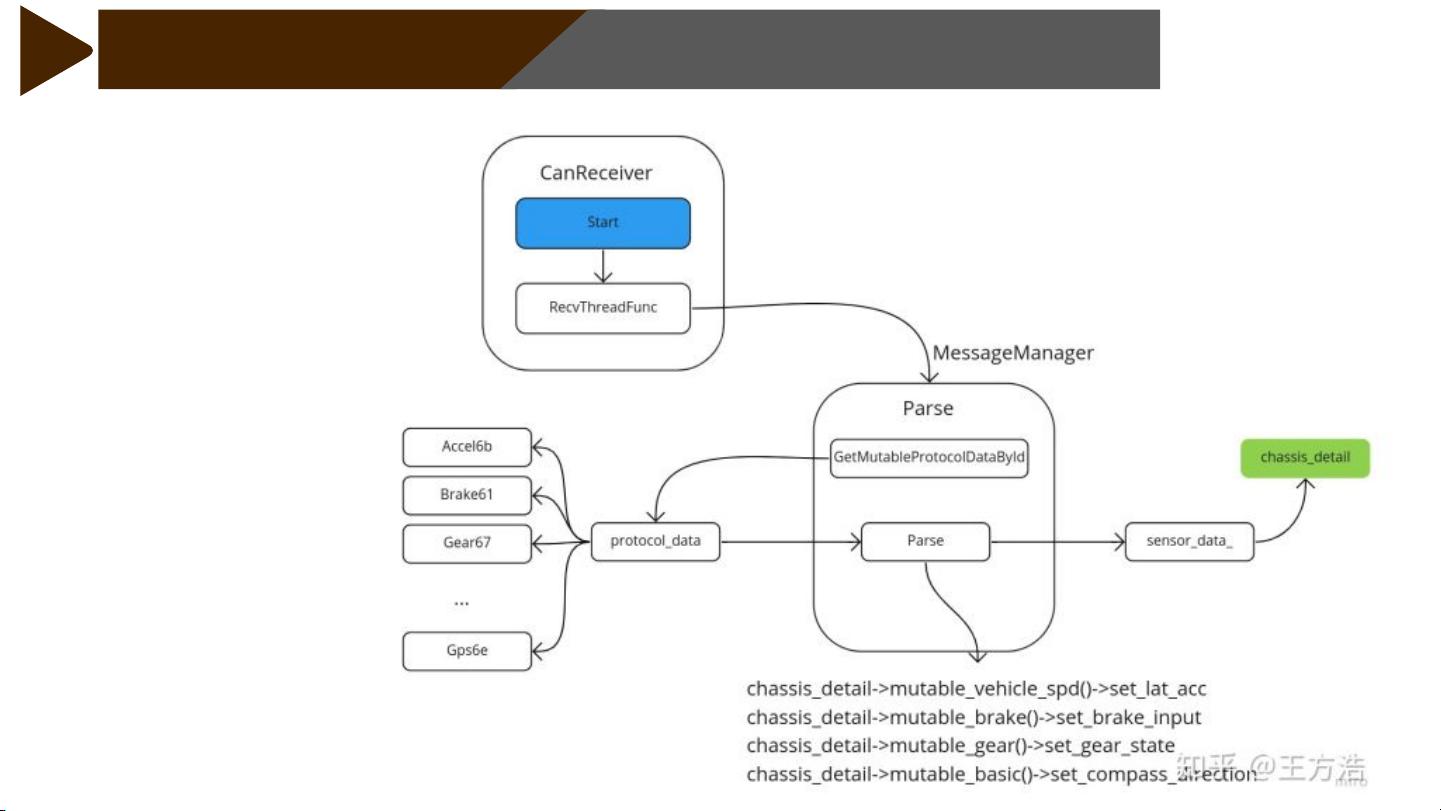
首先,文档介绍了自动驾驶系统的基本构成,包括感知、规划和控制三个主要部分。感知模块负责通过各种传感器(如雷达、激光雷达、摄像头等)获取周围环境信息;规划模块根据感知信息制定行驶路径和决策;控制模块则依据规划指令操作车辆。不同的研发团队可能在这些部分的设计上有所差异,因此仿真测试需覆盖所有可能的情况。
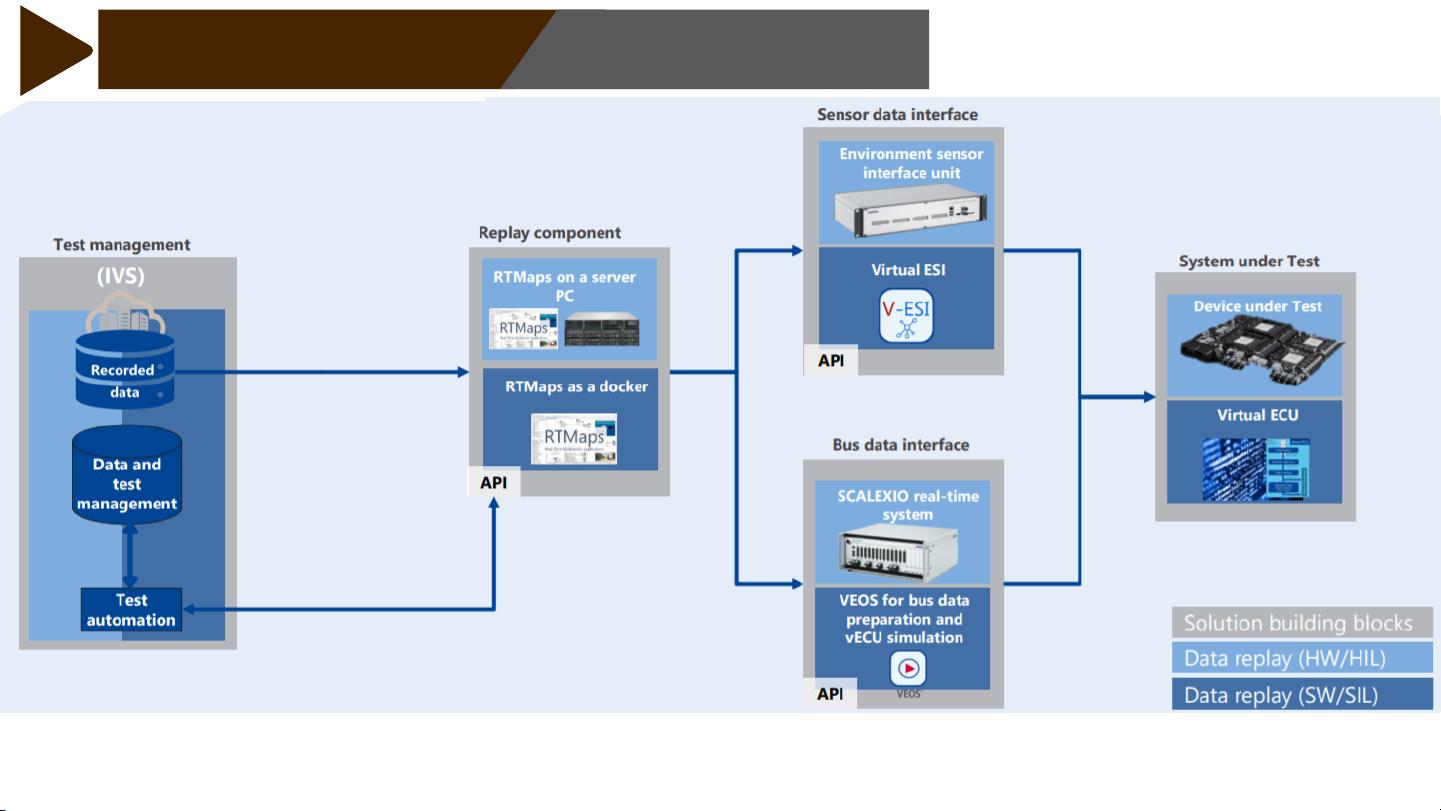
接着,文档深入讨论了仿真测试系统的设计,特别是汽车领域的SIL (Software in the Loop)、HIL (Hardware in the Loop)、DIL (Dynamic in the Loop) 和 VIL (Virtual in the Loop) 测试系统。这些测试方法分别对应于软件、硬件、动态行为和虚拟环境的不同层面,对于验证自动驾驶系统的功能性和安全性至关重要。硬件架构和传感器类型属性会直接影响到HIL和VIL仿真测试策略的选择。
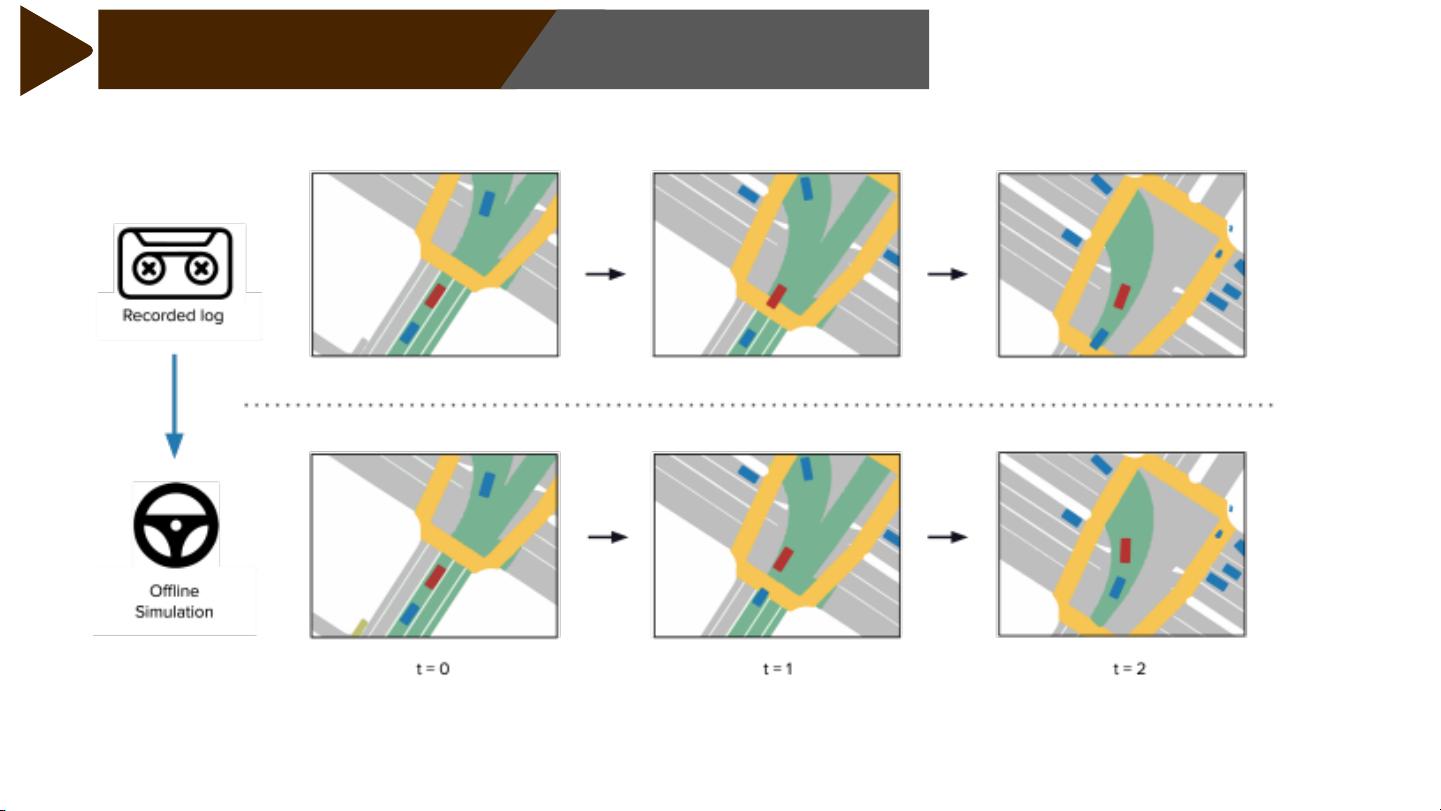
此外,文档还提到了虚拟场景与场景库的设计。在自动驾驶仿真中,构建多样化的场景库以模拟复杂的城市交通环境和各种异常情况是十分必要的。这包括不同天气、交通流量、道路条件等,确保测试覆盖到可能出现的所有驾驶场景。
文档中强调了ADS (Automated Driving System) 与ADAS (Advanced Driver Assistance Systems) 的测试差异。ADAS通常关注单一目标的检测和特定场景的应用,而ADS测试则需要考虑更复杂的连续应用场景,涉及更多的目标检测、跟踪,以及对道路、环境和交通规则的理解。
面对ADS测试的挑战,例如目标检测的准确性、帧率、跟踪稳定性、车道线拟合等问题,文档指出,这些都需要基于概率统计的算法(如AI运算和变量微调)来解决。同时,测试体系需要涵盖关键场景、边缘场景和海量场景,以满足功能安全和SOTIF(预期功能安全)的要求,确保高测试覆盖率。
这篇文档是自动驾驶仿真测试工程师和相关研究人员的宝贵参考资料,它提供了全面的理论知识和实践经验,有助于理解和优化自动驾驶系统的测试流程和性能。

2.
接口分析——HDMap数据匹配
仿真测试系统分析与设计
├── data // 生成好的地图
│ └── demo
├── hdmap // 高精度地图
│ ├── adapter // 从xml文件读取地图(opendrive保存格式为xml)
│ │ └── xml_parser
│ └── test-data
├── pnc_map // 给规划控制模块用的地图
│ └── testdata
├── proto // 地图各元素的消息格式(人行横道,车道线等)
├── relative_map // 相对地图
│ ├── common
│ ├── conf
│ ├── dag
│ ├── launch
│ ├── proto
│ ├── testdata
│ │ └── multi_lane_map
│ └── tools
├── testdata // 测试数据?
│ └── navigation_dummy
└── tools // 工具
message Map {
optional Header header = 1; //上面所说的地图基本信息
repeated Crosswalk crosswalk = 2; //人行横道
repeated Junction junction = 3; //交叉路口
repeated Lane lane = 4; //车道
repeated StopSign stop_sign = 5; //停车标志
repeated Signal signal = 6; //信号灯
repeated YieldSign yield = 7; //让车标志
repeated Overlap overlap = 8; //重叠区域
repeated ClearArea clear_area = 9; //禁止停车区域
repeated SpeedBump speed_bump = 10; //减速带
repeated Road road = 11; //道路
repeated ParkingSpace parking_space = 12; //停车区域
repeated Sidewalk sidewalk = 13; //路边的小路,或者行人走
的路,现在的版本已经去掉?但是其他模块有些还有sidewalk
}
HDMap模块的主要功能是“加载特定格式的地图,并且提供一系列的API给其他模块使用
剩余102页未读,继续阅读
1294 浏览量
461 浏览量
2022-12-17 上传
2024-10-26 上传
2024-10-26 上传
2024-10-26 上传
297 浏览量
268 浏览量
174 浏览量









