CAN总线通信协议详解:环回模式与帧类型
版权申诉
31 浏览量
更新于2024-06-25
收藏 2.4MB PPTX 举报
"CAN总线-CAN总线环回模式通信.pptx"
本文将深入探讨CAN(Controller Area Network)总线技术,特别是其环回模式通信。CAN总线是一种广泛应用的现场总线,尤其在汽车电子系统、工业自动化等领域中扮演着重要角色。它的主要特点是能够在局域网络中高效、可靠地传输数据。
CAN通讯协议是CAN总线的基础,它规定了数据格式、同步方式、传输速度、传送步骤和错误检测方法等关键要素。协议中,CAN数据块采用非归零(NRZ)编码,利用显性位(逻辑0)和隐性位(逻辑1)的差分电压表示,增强了抗干扰能力。由于CAN总线采用两线差分传输,同一时间只能有一个数据流,因此它是一种半双工通信方式。
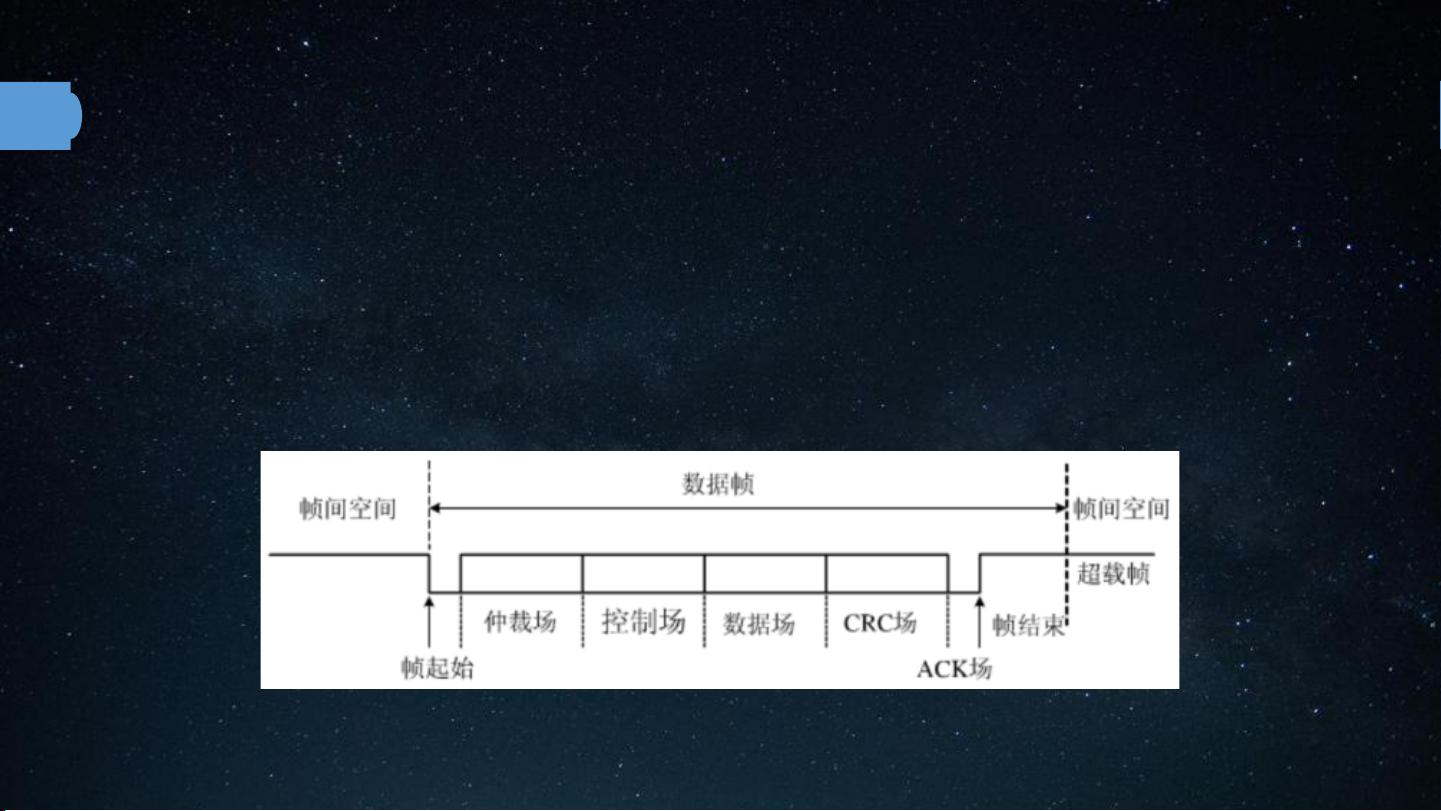
CAN报文分为四种帧类型:数据帧、远程帧、错误帧和过载帧。数据帧是实际传输数据的核心,包括帧起始、仲裁场、控制场、数据场、CRC场和应答场。仲裁场包含标识符(ID),用于确定优先级和冲突解决;控制场中的DLC(Data Length Code)指示数据字段的字节数;数据场最多可携带8字节的数据;CRC场用于错误检测;应答场则包含应答间隙和应答位,接收方通过发送应答位来确认接收。
CAN总线的环回模式通信是一种调试和测试工具,允许设备在不实际连接到其他节点的情况下,自检其发送和接收功能。在这种模式下,发送的数据被立即反射回发送节点,使得节点可以检查自己的发送和接收逻辑是否正确。
环回模式对于开发者来说非常有用,因为它可以在不干扰网络其他部分的情况下,对单个节点进行功能验证。此外,这种模式也有助于识别硬件或软件故障,因为任何数据传输的问题都会立即在环回过程中显现出来。
CAN总线的环回模式通信是理解和调试CAN网络的关键组成部分,它提供了对设备通信功能的本地验证,确保了整个网络的稳定性和可靠性。了解并掌握这些知识,对于从事CAN总线相关工作的人来说至关重要。
CAN总线应用
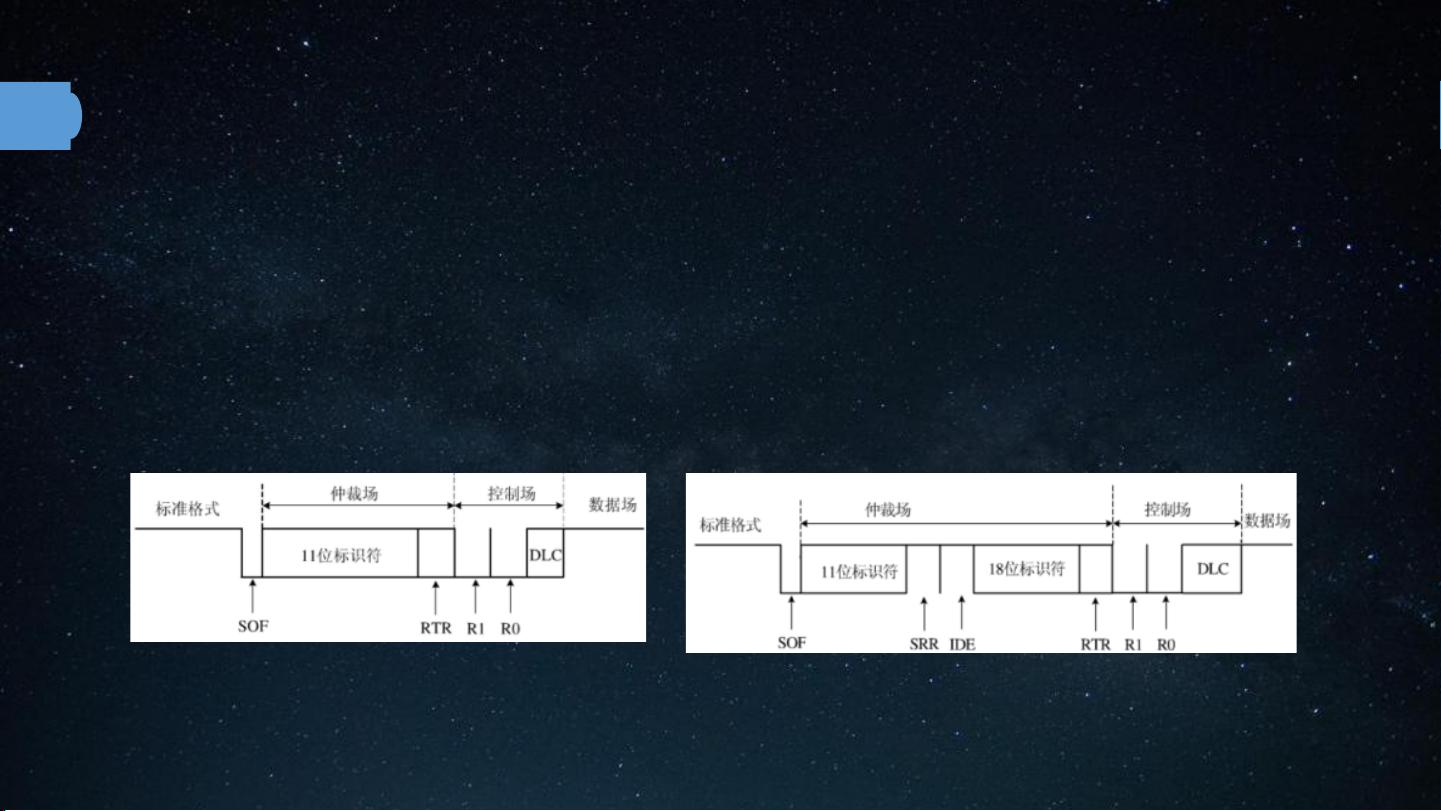
数据帧:
2)仲裁场 由标识符和传送帧类型(RTR)组成的仲裁场。对于数据帧 RTR恒为0,SRR恒为1,因此可以根据仲裁场起始第12个字
符数判断是标准帧还是扩展帧。
标准帧格式: 扩展帧格式:
CAN通讯帧的格式
剩余30页未读,继续阅读
点击了解资源详情
285 浏览量
点击了解资源详情
147 浏览量
2021-10-23 上传
2022-11-23 上传
2021-05-24 上传
141 浏览量
137 浏览量

知识世界
- 粉丝: 375
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- neo4j-community-4.x-unix.tar.gz and neo4j-community-4.x-windows.zip
- django-user-test
- functoria-lua:用很多函子来构建Lua解释器
- Umpyre
- 阿登脚印
- 高斯白噪声matlab代码-DIPCA-EIV:此回购包含了动态迭代PCA的实现,该PCA提议用于识别输入和输出测量值被高斯白噪声破坏的系统
- SpringBoot+Dubbo+MyBatis代码生成器
- fqerpcur.zip_MATLAB聚类GUI
- pg_partman:PostgreSQL分区管理扩展
- 下一店
- Umbles
- 图像处理:用于D2L图像处理的基于聚合物的Web组件
- queryoptions-mongo:Go软件包,可帮助构建基于queryoptions的MongoDB驱动程序查询和选项
- Redis-MQ:基于Redis的快速,简洁,轻量级的注解式mq,可以与任何IOC框架无缝衔接
- 答题卡检测程序/霍夫变换
- FANUC二次开发文档
