全球人形机器人研究新进展:应用与跨领域探索
需积分: 9 20 浏览量
更新于2024-07-18
收藏 9.55MB PDF 举报
"《人类仿生机器人:新进展》一书探讨了人类形态机器人领域的前沿研究,这些研究旨在不仅创造出具备自主性的机器人,还通过模拟人类身体系统的特性,来深化我们对生物力学、生物模仿学、控制论等领域的理解。书中收录了一系列来自全球各地研究人员的贡献,他们共同分析和讨论了关于机器人手部设计、学习能力、语言处理、视觉系统和运动控制等方面的关键议题。
在本书中,读者可以了解到最新的科研成果,如如何设计出更加逼真、灵活的机械手指,以及如何利用深度学习算法让机器人模仿人类的学习过程。此外,书中也涵盖了视觉传感器和计算机视觉技术的发展,这些技术使得机器人能更好地理解和适应复杂的环境。语言交流是另一个关键领域,研究者们探索了如何使机器人具备自然对话的能力,从而与人类进行更有效的交互。
在机器人运动控制方面,作者们分享了关于行走、奔跑和平衡控制的新方法,这些进步对于康复机器人技术具有重要意义,可以帮助伤残人士恢复日常生活功能。同时,书中还探讨了机器人在康复领域可能的应用,比如定制化的物理治疗和陪伴护理。
总体而言,《人类仿生机器人:新进展》这本书不仅提供了丰富的学术资源,为后续的研究提供了灵感和方向,还激发了公众对这一交叉学科的兴趣,即机器人技术与人体科学的融合。它标志着我们在迈向更智能、更人性化的机器人技术道路上迈出了坚实的步伐,同时也提醒我们,尽管取得了显著的进步,但在伦理、安全和隐私等方面仍需谨慎对待。"
Design of Modules and Components for Humanoid Robots 7
Fig. 4. Topology optimization scheme.
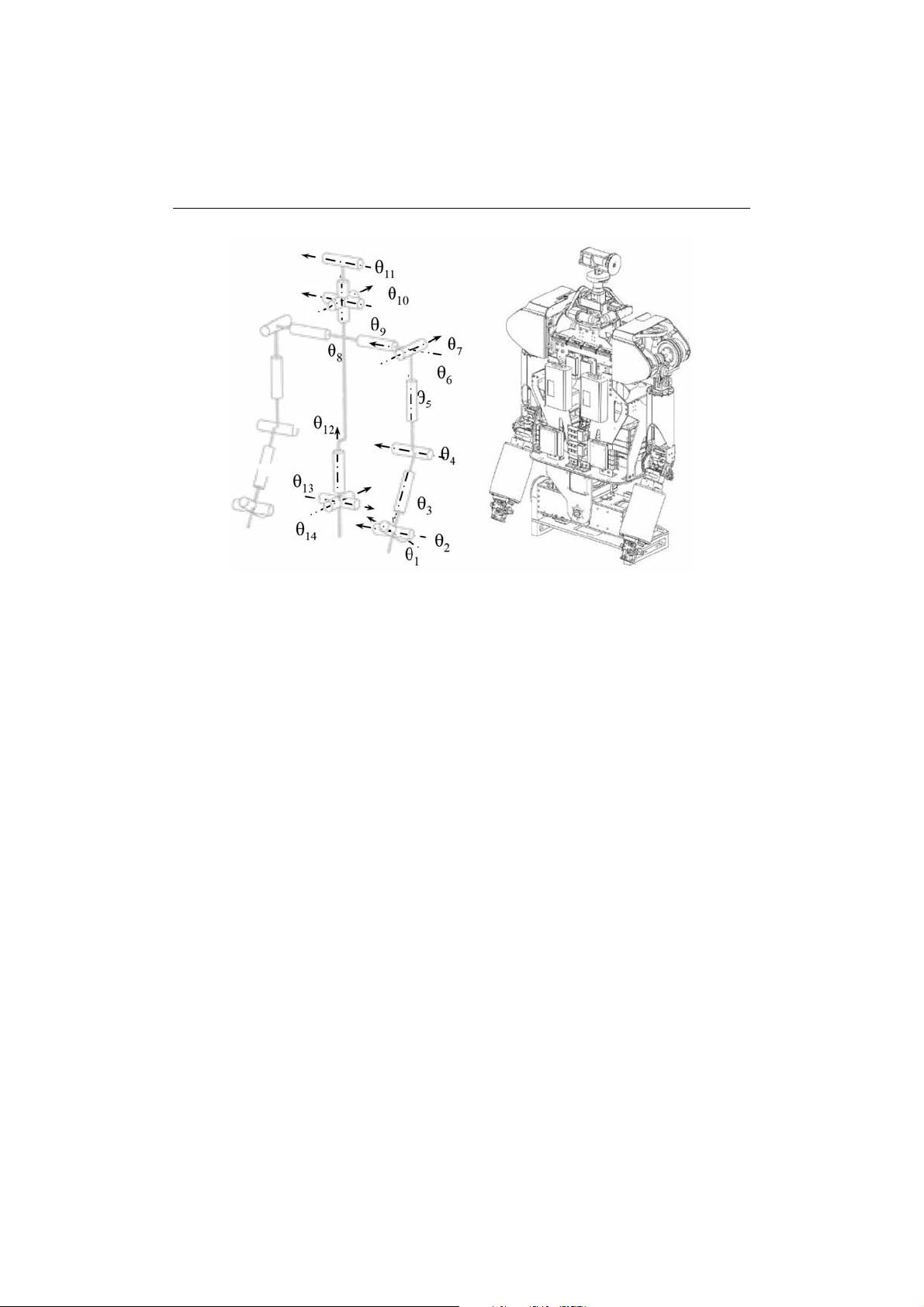
4.1 Topology optimization of robot thorax
The design of the central support structure of the upper body, the thorax, of the humanoid
robot ARMAR III was determined with the help of topology optimization. The main
functions of this element are the transmission of forces between arms, neck and torso joint
and the integration of mechanical and electrical components, which must be accommodated
for inside the robot’s upper body. For instance four drive units for the elbows have to be
integrated in the thorax to reduce the weight of the arms, electrical components like two PC-
104s, four Universal Controller Modules (UCoM), A/D converters, DC/DC converters and
force-moment controllers.
Fig. 5. Topology optimization of the thorax.
剩余590页未读,继续阅读
2018-09-10 上传
2021-04-28 上传
2019-06-20 上传
2021-06-01 上传
2021-02-11 上传
2024-10-17 上传
2021-06-14 上传
点击了解资源详情

shigaofeng1987
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
