




ARM与MEMS驱动的微惯性测量装置:精确捕捉鱼类尾鳍动态
PDF格式 | 532KB |
更新于2024-08-28
| 166 浏览量 | 举报
本文主要探讨了基于ARM与MEMS器件的微惯性测量装置的设计,这是一种创新性的技术解决方案,旨在精确测量生物运动,特别是在仿生推进领域的应用,如鱼类尾鳍拍动参数。文章的核心是采用了ARM7架构的LPC2129微处理器作为核心处理单元,这是一款功耗低、体积小且功能强大的芯片,支持实时仿真和跟踪。
LPC2129集成了16KB片内SRAM和256KB嵌入式Flash存储器,使得数据处理和存储能力得到提升。其特性还包括16位/32位ARM7TDMI-SCPU,32位定时器、4路10位ADC以及丰富的外部中断和GPIO接口,确保了系统的高效运行和灵活扩展。此外,选择LPC2129的原因在于它能满足小型化、低功耗的需求,这对于微惯性测量装置来说是非常关键的。
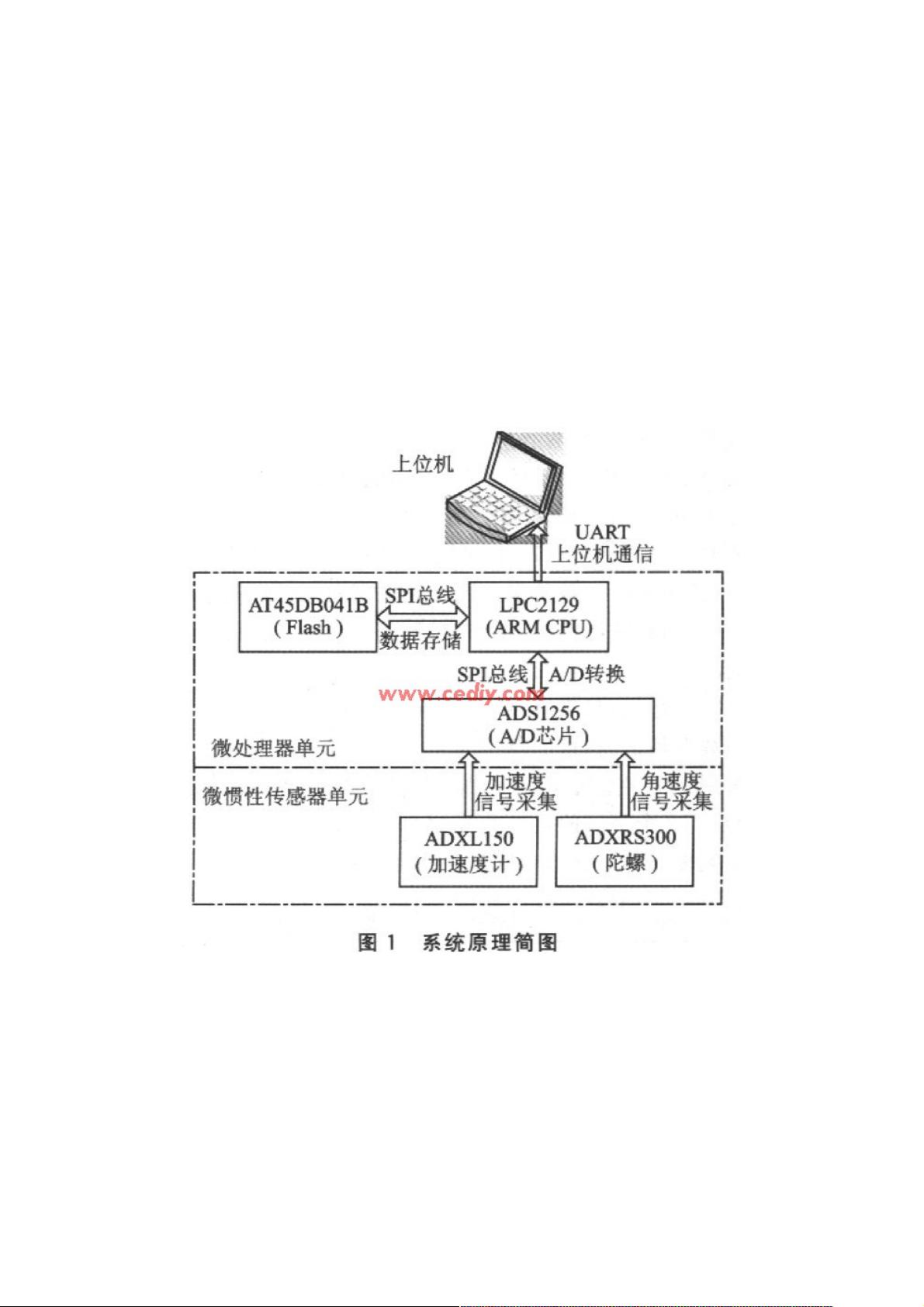
微惯性测量装置的硬件结构分为两部分:微处理器单元和微惯性传感器单元。前者包含微处理器、A/D转换芯片和Flash,用于数据采集、存储和通信。后者则由MEMS陀螺和加速度计构成,负责实时采集加速度和角速度数据。采集到的数据经过A/D转换后,会被存储在Flash中,或者直接发送到上位机进一步处理。
系统设计充分考虑了活体鱼类的生物特征和实验环境的需求,如体积小巧、重量轻、低功耗、高频率和高精度的数据采集能力,以及良好的防水密封性能。通过与SPC-III机器鱼尾鳍拍动参数的精确测量实验相结合,该装置为国内首次利用MEMS器件进行活体鱼尾鳍拍动参数测量提供了技术基础,从而推动了机器鱼仿生推进设计理论的发展。
文章还提及了软件设计策略,LPC2129并未采用常见的嵌入式操作系统,而是采用了一种后台定时中断的结构,这可能是因为这种设计更符合微惯性测量装置实时数据处理的需求,提高了系统响应速度和稳定性。
本文详细阐述了基于ARM7处理器LPC2129和MEMS传感器的微惯性测量装置设计,其在生物运动测量领域的应用潜力和技术创新性,以及在鱼类仿生推进研究中的重要作用。通过优化硬件和软件设计,该装置不仅提升了测量精度,还降低了设备复杂性和成本,为未来相关领域的研究和应用开辟了新的路径。
基于基于ARM与与MEMS器件的微惯性测量装置设计器件的微惯性测量装置设计
摘要摘要 开发一种生物运动微惯性测量装置,以基于ARM7的LPC2129为核心处理单元,采用MEMS陀螺和MEMS加速度计为测
量传感器。该装置实现了对SPC-III机器鱼尾鳍拍动参数的精确测量,为活体鱼尾鳍拍动参数测量实验打下了基础。
关键词关键词 微惯性测量 LPC2129 MEMS器件 尾鳍拍动
在仿生推进机理的研究中,精确测量鱼类尾鳍拍动参数对于鱼类仿生推进机理研究及工程应用具有重要的意义;然而,目
前研究者大多采用分析高速摄像机拍摄的图像获得参数的观测方法。这种方法受到环境与设备的限制,结果精确度较差。本设
计是一种基于MEMS器件的生物运动微惯性测量装置。利用该装置实现了对SPC-III机器鱼尾鳍拍动参数的精确测量,为国内
首次利用MEMS器件进行的活体鱼尾鳍拍动参数测量实验打下了基础,为机器鱼仿生推进设计理论提供支撑。
1 设计要求和系统结构设计要求和系统结构
根据活体鱼类的生物特征和实验本身的特点,微惯性测量装置应该满足下列设计要求:体积小,质量轻,功耗低,采集频
率和采集精度高,防水密封性能良好。为了实现这些需求,微惯性测量装置的硬件由两部分组成:①微处理器单元;②微惯性
传感器单元。微处理器单元主要包括微处理器、A/D转换芯片和Flash。微处理器作为核心单元,通过SPIl口连接A/D转换
芯片完成数据采集,通过SPIO口连接Flash完成数据存储,通过串口与上位机通信。微惯性传感器单元是由MEMS加速度计和
MEMS陀螺所组成的,完成加速度与角速度的原始信息采集任务。采集的原始信息经过A/D转换处理后,写入Flash芯片中保
存,或通过串口直接发送至上位机进行处理。系统原理简图如图l所示。
2 微处理器单元微处理器单元
2..1 LPC2129处理器处理器
本装置既要求微处理器具有一定的处理能力又要求功耗低、体积小,所以选用Philips公司的LPC2129。LPC2129基于一个
支持实时仿真和跟踪的16/32位ARM7TDMI-SCPU,并带有16 KB片内SRAM和256KB嵌入的高速片内Flash存储器。
LPC2129具有LQFP64的较小封装、极低的功耗、多个32位定时器、4路10位ADC、9个外部中断、最多可达46个GPIO等。
在LPC2129的软件设计上,未采用ARM上常用的uC/OS-II或uClinux操作系统,而是使用前后台式的定时中断结构。这种
前后台式的定时中断结构更适于实时性要求很高的控制系统,可以保证控制回路延迟均在一个设计确定的范围内,并且各个模
块问优先级关系十分明确,使用起来较为方便。
2..2 A//D转换采集芯片转换采集芯片ADSl256
A/D转换芯片采用美国TI公司的24位串行模/数转换器ADSl256。其可提供高达23位的无噪声精度,数据速率最高可达30
ksps。ADSl256采用四线制SPI通信方式,与LPC2129的SPIl接口相连,可以灵活方便地进行通信。
ADS1256采用多通道循环采集的工作方式。在数据准备信号DRDY提示可以提取数据后,首先将当前的采集通道变为下一
个采集通道,开始新的采集转换,然后再马上提取A/D转换寄存器中的数据(这时的数据其实是上一轮转换好的数据)。这种
方式在实现提取数据的同时进行新数据的采集转换,是一种高效率的工作方式。
2..3 Flash芯片芯片AT45DB041B
Flashl选用Atmel公司的可编程串行存取芯片AT45DB041B。主存储单元分为2048页,每页264字节;具有2个264字节静态
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐



weixin_38617615
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开








最新资源
- 三菱MR-J2S-A系列伺服参数设置与动态调整软件
- PCB电路设计与布局256条规范解析
- 集成电路工艺详细讲义教程
- 设计商店软件销售查询系统的实现方案
- Windows平台64位Apache Tomcat 8.0.33版本发布
- Wsockexper汉化版:网页抓包新利器
- Linux常用命令汇总详解
- MATLAB实现直角坐标系牛顿拉夫逊潮流计算方法
- C#中使用PDFBox-0.7.3读取PDF文本的教程
- Jupyter Notebook揭秘疯狂三月赛事数据分析
- C#提取视频关键帧实用源代码
- 严蔚敏版数据结构课件及答案解析
- CDBurnerXP v4.5.8.7042中文版发布 - 光盘烧录及ISO映像制作工具
- 简易银行系统开发实战解析与代码实现
- 提高论文查重率的有效方法与技巧
- Vue项目开发流程及配置详解






















