TM1629A LED驱动控制器规格与特性解析
需积分: 42 90 浏览量
更新于2024-07-23
收藏 742KB PDF 举报
"TM1629a规格书"
TM1629A是一款专用于LED驱动控制的集成电路,尤其适用于冰箱、空调、家庭影院等家电产品的高段位显示屏驱动。这款芯片集成了一系列功能,包括MCU数字接口、数据锁存器、LED高压驱动电路以及键盘扫描电路,提供了一种高效、便捷的LED显示解决方案。
TM1629A的特点之一是其采用功率CMOS工艺,确保了低功耗和较高的工作稳定性。它支持16段×8位的显示模式,能够灵活控制16个独立的LED段,满足多种字符和数字显示需求。此外,芯片内置了辉度调节电路,可实现8级占空比调节,允许用户根据环境光线调整LED的亮度。
该芯片的串行接口由CLK(时钟输入)、STB(片选)和DIO(数据输入输出)组成。通过CLK的上升沿进行数据的输入和输出,而STB信号用于初始化串行接口并选择接收指令。当STB为低时,第一个接收到的字节被视为指令,且在此期间,其他操作将被暂停。在STB为高时,CLK信号将被忽略。DIO端口在输出数据时采用N管开漏方式,因此在读取按键状态时,需要外部连接一个1K至10K欧姆的上拉电阻,推荐使用10K欧姆。
TM1629A的段输出(SEG1到SEG16)和位输出(GRID1到GRID8)都是开漏输出,允许用户根据需要配置外部电路。逻辑电源VDD为5V±10%,逻辑地VSS需连接到系统地。值得注意的是,DIO口的数据读取应在时钟上升沿进行,以确保数据的稳定。
在实际应用中,TM1629A的内部电路图和显示寄存器配置对于正确操作至关重要。芯片的工作原理和具体控制流程通常会在规格书中详细说明,包括如何设置辉度、如何通过串行接口传递数据、以及如何处理键盘扫描等。这些信息对于开发者来说是设计和调试基于TM1629A的LED驱动系统的关键。
TM1629A是一种功能丰富的LED驱动控制器,具备高度集成和灵活性,广泛适用于各种家电和电子设备的显示界面。理解和掌握其工作原理和管脚定义,能够帮助工程师更有效地利用这款芯片设计出高效、用户友好的LED显示系统。
LED 驱动控制专用电路 TM1629A
www.titanmec.com
- 3 -
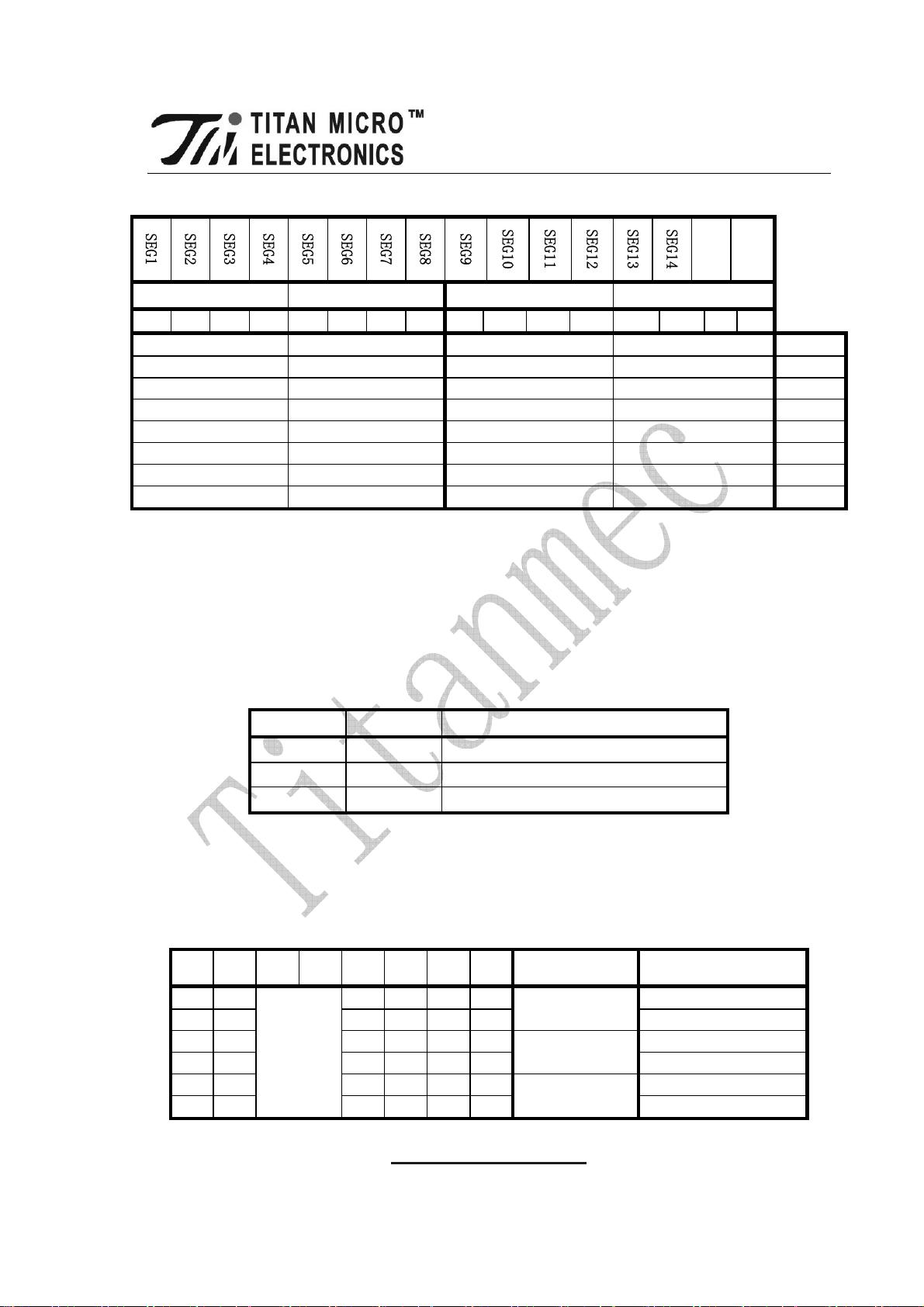
分别与芯片SGE和GRID管脚所接的LED灯对应,分配如下图:
写LED显示数据的时候,按照从显示地址从低位到高位,从数据字节的低位到高位操作。
S
E
G
1
S
E
G
2
S
E
G
3
S
E
G
4
S
E
G
5
S
E
G
6
S
E
G
7
S
E
G
8
S
E
G
9
S
E
G
1
0
S
E
G
1
1
S
E
G
1
2
S
E
G
1
3
S
E
G
1
4
SEG15
SEG16
xxHL(低四位) xxHU(高四位) xxHL(低四位) xxHU(高四位)
B0 B1 B2 B3 B4 B5 B6 B7 B0 B1 B2 B3 B4 B5 B6 B7
00HL 00HU 01HL 01HU GRID1
02HL 02HU 03HL 03HU GRID2
04HL 04HU 05HL 05HU GRID3
06HL 06HU 07HL 07HU GRID4
08HL 08HU 09HL 09HU GRID5
0AHL 0AHU 0BHL 0BHU GRID6
0CHL 0CHU 0DHL 0DHU GRID7
0EHL 0EHU 0FHL 0FHU GRID8
图(2)
写LED显示数据的时候,按照从低位地址到高位地址,从字节的低位到高位操作;在运用中没有使
用到的SEG输出口,在对应的BIT地址位写0。
六、 指令说明:
指令用来设置显示模式和LED 驱动器的状态。
在STB下降沿后由DIO输入的第一个字节作为一条指令。经过译码,取最高B7、B6两位比特位以
区别不同的指令。
B7 B6 指令
0 1 数据命令设置
1 0 显示控制命令设置
1 1 地址命令设置
如果在指令或数据传输时STB被置为高电平,串行通讯被初始化,并且正在传送的指令或数据
无效(之前传送的指令或数据保持有效)。
6.1 数据命令设置:
该指令用来设置数据写和读,B1和B0位不允许设置01或11。
MSB LSB
B7 B6 B5 B4 B3 B2 B1 B0 功能 说明
0 1 0 0 写数据到显示寄存器
0 1 1 0
数据读写模式
设置
读键扫数据
0 1 0 自动地址增加
0 1 1
地址增加模式
设置
固定地址
0 1 0 普通模式
0 1
无关项,
填0
1
测试模式设置
(内部使用)
测试模式
剩余14页未读,继续阅读
2013-03-17 上传
2011-12-07 上传
2023-10-05 上传
2012-10-25 上传
2023-11-11 上传
1203 浏览量
636 浏览量

u014712873
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
