




PID控制算法详解:从基础到大林算法
需积分: 10 117 浏览量
更新于2024-07-26
收藏 322KB PPT 举报
"数字PID控制算法,包括PID调节原理,数字实现方法,算法发展及参数整定,特别提到了大林算法。"
PID控制算法是工业自动化领域广泛应用的一种控制策略,其核心在于通过比例(P)、积分(I)和微分(D)三个部分的结合来实现对系统的精确控制。在直接数字控制(DDC)中,PID算法被用于实时处理来自传感器的信号,以调整执行机构的动作,从而达到期望的控制效果。
4.1 PID调节
PID调节器的优势在于它的简单性和实用性。首先,由于其广泛的应用历史,技术已经相当成熟,可以稳定可靠地工作。其次,PID控制器易于理解和操作,使得工程师和技术人员能够快速掌握其工作原理和调试方法。再者,PID控制器在设计时不需要系统精确的数学模型,这极大地简化了应用过程。最后,即使在复杂的动态系统中,适当的参数设定也可以获得良好的控制性能。
4.1.1 PID调节器的优点
- 技术成熟:经过长时间的发展和完善,PID控制技术在稳定性、鲁棒性方面表现出色。
- 易于理解和使用:用户不需要深入理解系统的复杂动态行为,也能有效使用PID控制器。
- 不需数学模型:与基于模型的控制方法相比,PID控制器可以直接根据实际反馈进行调整。
- 控制效果好:适当的参数设置下,PID能实现快速响应并减少超调。
4.1.2 PID调节器的作用
- 比例调节器(P):提供即时的控制响应,减小偏差,但可能导致振荡。
- 比例积分调节器(PI):通过积分作用消除稳态误差,提高系统的无差度,但积分可能会导致系统响应缓慢。
- 比例微分调节器(PD):引入微分作用可以预测系统未来变化,提前进行调整,减少超调,增加系统的稳定性。
- 比例积分微分调节器(PID):结合P、I、D三者,兼顾快速响应、消除稳态误差和抑制超调,实现最佳控制效果。
4.2 PID算法的数字实现
在实际的数字控制系统中,PID算法需要通过采样和离散化来实现。采样时间的选择和算法实现方式(如Z变换、Tustin变换等)都会影响到系统的性能和稳定性。
4.3 PID算法的几种发展
随着控制理论和技术的进步,PID算法衍生出了多种改进形式,如自适应PID、模糊PID、神经网络PID等,以适应更复杂、非线性的控制任务。
4.4 PID参数的整定
PID参数的整定是确保控制器性能的关键步骤,通常采用经验法、临界比例法、响应曲线法或现代优化算法(如遗传算法、粒子群优化等)来确定合适的比例Kp、积分Ki和微分Kd系数。
4.5 大林算法
大林算法是一种自动整定PID参数的方法,由日本学者大林美佐绪提出,旨在快速、有效地找到接近最优的PID参数值,以适应特定系统的动态特性。
数字PID控制算法是现代工业控制中的基石,其灵活的结构和广泛的适用性使其在各种领域都得到了广泛的应用。通过不断的研究和发展,PID算法将继续在控制工程中发挥重要作用。
第四章 直接数字控制及其算法
若将比例和积分两种作用结合起来,就构成 PI
调节器,调节规律为:
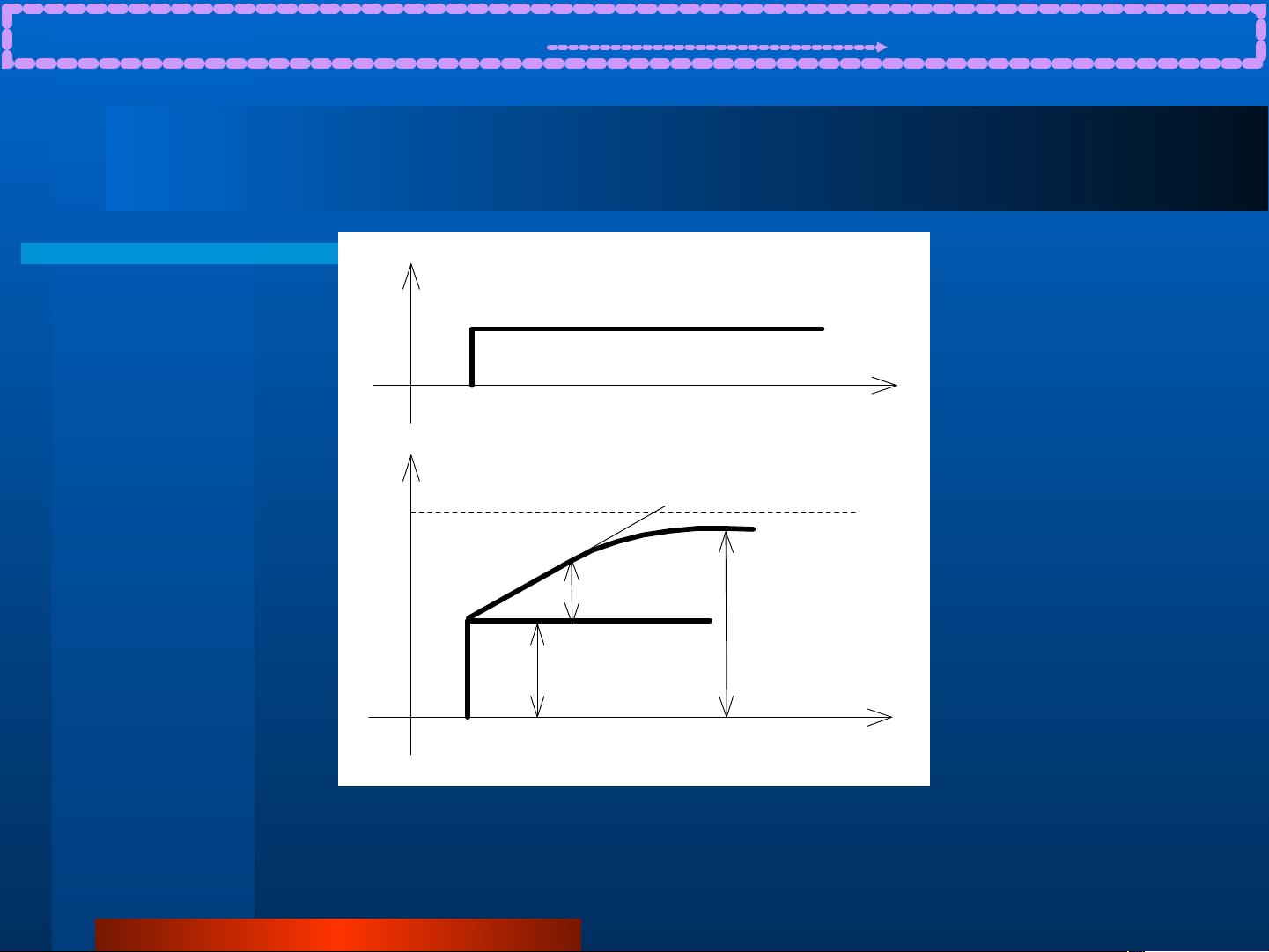
PI 调节器的输出特性曲线如图 4-3 所示。
剩余49页未读,继续阅读
125 浏览量
137 浏览量
257 浏览量
407 浏览量
1751 浏览量
2021-10-12 上传
2021-09-24 上传
2022-06-27 上传

huanghui310
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- 基于DOM原理的XML文件读取markup程序解析
- Automon:融合AOP与日志库的Java监控解决方案
- Google Pay忠诚度API演示程序构建教程
- ASP.NET中的敏感关键字过滤技术
- 体验稳定提升的FlyMcu STM32下载软件
- PyGTK+Glade打造线性规划求解器
- Android多选自定义相册功能实现源码解析
- 单片机电子密码锁设计与实现
- 探索Pymcworld:创新的我的世界自定义世界创建工具
- uploadify上传插件在jQuery中的强大功能
- USB485驱动端口兼容性测试:稳定运行于多平台
- MATLAB小波分析应用实例代码详解
- 激光领域名著《siegman: LASER》分享
- 深入解析SNMP4J-Agent官方源码版本
- 探索PHP SideHustle项目及其技术要点
- OpenGL新手入门:绘制圣诞树教程






















