ABB机器人坐标系详解:关键操作与应用
版权申诉
56 浏览量
更新于2024-07-04
收藏 451KB DOC 举报
本文档详细介绍了ABB机器人的坐标系概念及其在机器人操作中的重要作用。坐标系是机器人运动的基础,它们允许机器人精确地定位和控制在三维空间中的运动。主要有以下几种坐标系:
1. 基坐标系:这是机器人本身的参考框架,通常位于机器人基座上,拥有固定的零点,确保了机器人的移动具有可预测性。基坐标系适合于机器人在空间中的大范围移动,但编程时往往选择其他更适合精细操作的坐标系,比如工件坐标系。
2. 工件坐标系:与实际加工对象(如工件)紧密相关,是编程中最常用的坐标系,便于对机器人进行精准定位和操作。工件坐标系可以有多个,每个对应不同的工件,需要定义在用户框架(与大地坐标系相连)和工件自身的框架内。
3. 工具坐标系:定义了机器人执行任务时工具末端的位置,这对于执行特定任务至关重要,如焊接、抓取或喷涂等。
4. 大地坐标系:这是一个全局坐标系统,是所有其他坐标系的基准,用于描述整个工作单元或工作站内的相对位置。在默认设置下,大地坐标系与基坐标系重合,但在多机器人或包含外部轴移动的工作站中,这个特性尤为重要。
5. 用户坐标系:这是一种灵活的坐标系,用于表示与机器人互动的物体,如夹具、工具或其他设备,便于编程和控制。
理解并熟练运用这些坐标系,能有效提高ABB机器人的工作效率和精度。例如,在基坐标系中,通过控制杆的操作,X轴、Y轴和Z轴的移动分别代表正向和侧向的平移以及垂直的升降。而在工件坐标系中,根据具体任务需求调整,可以使机器人更精准地与工件交互。
总结来说,ABB机器人的坐标系设计是实现高效自动化生产的关键,理解并正确使用这些坐标系是每个操作员必备的技能。文档中提供的图形示例和详细解释有助于用户深入掌握这一概念,并将其应用于实际操作中。
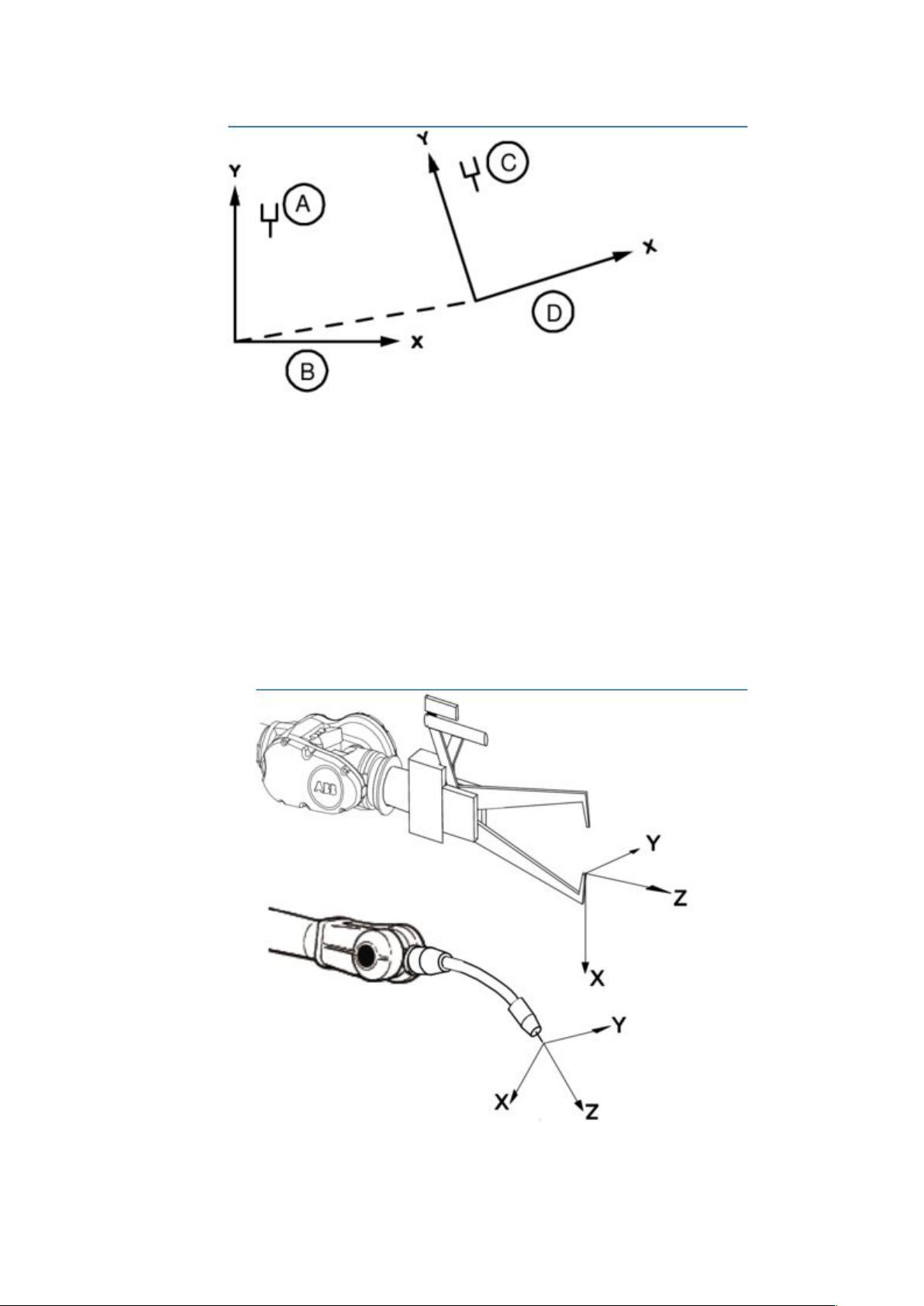
位移坐标
系
A
原始位置
B
工件坐标系
C
新位置
D
位移坐标系
有时,会在若干位置对同一对象或若干相邻工件执行同一路径。
为了避免每次都必须为所有位置编程,可以定义一个位移坐标
系。
此坐标系还可与搜索功能结合使用,以抵消单个部件的位置差
异。
位移坐标系基于工件坐标系而定义。
工具坐标
系
工具坐标系将工具中心点设为零位。 它会由此定义工具的位置和
方向。 工具坐标系经常被缩写为 TCPF (Tool Center Point
剩余15页未读,继续阅读
2023-07-11 上传
2022-06-30 上传
2022-06-30 上传
2024-11-04 上传
2024-11-06 上传
2024-11-06 上传
2024-11-04 上传
2024-11-06 上传
2024-11-06 上传

猫一样的女子245
- 粉丝: 230
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
