机器人无线连接与SSH登陆指南
需积分: 0 60 浏览量
更新于2024-08-03
1
收藏 626KB PDF 举报
"该文档主要介绍了2020年之前版本的小车在Ubuntu 18.04系统下的两种连接方式:4.1章节是关于机器人自建AP热点和SSH登陆,4.1.2章节涉及无线连接WiFi和SSH登陆。对于2023年之后的版本,这些步骤可能不再适用。"
在4.1章节中,机器人通过自建AP热点,使其成为路由器,允许PC和手机通过连接这个热点与机器人进行通信。默认的热点名为BingDa_Robot,密码是12345678。当设备连接到这个热点后,机器人会为设备分配IP地址,例如192.168.9.159,而机器人的IP通常是192.168.9.1。为了远程登陆机器人,可以使用SSH工具,如Putty。在Putty中填写机器人的IP,设置别名,保存配置,以便于后续快速连接。登录时,用户名和密码默认都是"bingda",注意密码输入时不会显示。
在4.1.1部分还提到了,机器人的AP模式配置文件位于/etc/create_ap.conf,用户可以根据需要修改其中的网络设置,如网关、无线通道、WiFi名称和密码。
4.1.2章节则讲述了如何让机器人连接到WiFi并使用SSH登陆。首先,机器人需通过网线连接到路由器,然后在路由器的管理界面查找机器人的IP地址(例如192.168.31.131)。接着,使用SSH工具,如Xshell,建立一个新的连接,输入机器人的IP地址,确定连接。同样,登录时使用的用户名和密码也是"bingda"。登录后,使用`ifconfig`命令检查当前的网络连接状态。
这些步骤对理解机器人如何建立网络连接以及如何通过SSH进行远程控制至关重要,尤其是在没有内置WiFi功能或需要在不同网络环境下操作机器人时。然而,对于2023年之后的版本,这些方法可能已被更新的系统或连接方式替代,因此建议查阅最新的用户手册或技术支持文档。
4.1 底盘基础功能
4.1.1 机器人自建 AP 热点和 ssh 登陆(Ubuntu18.04 系统适用)【2020 年之前
购买的小车观看,2023 年之后的无需观看
本节内容介绍机器人自建热点的连接和 ssh 远程登陆;所谓 AP 模式就是以机器
人作为路由器,PC 和手机都通过连接机器人的热点上和机器人通信。机器人在
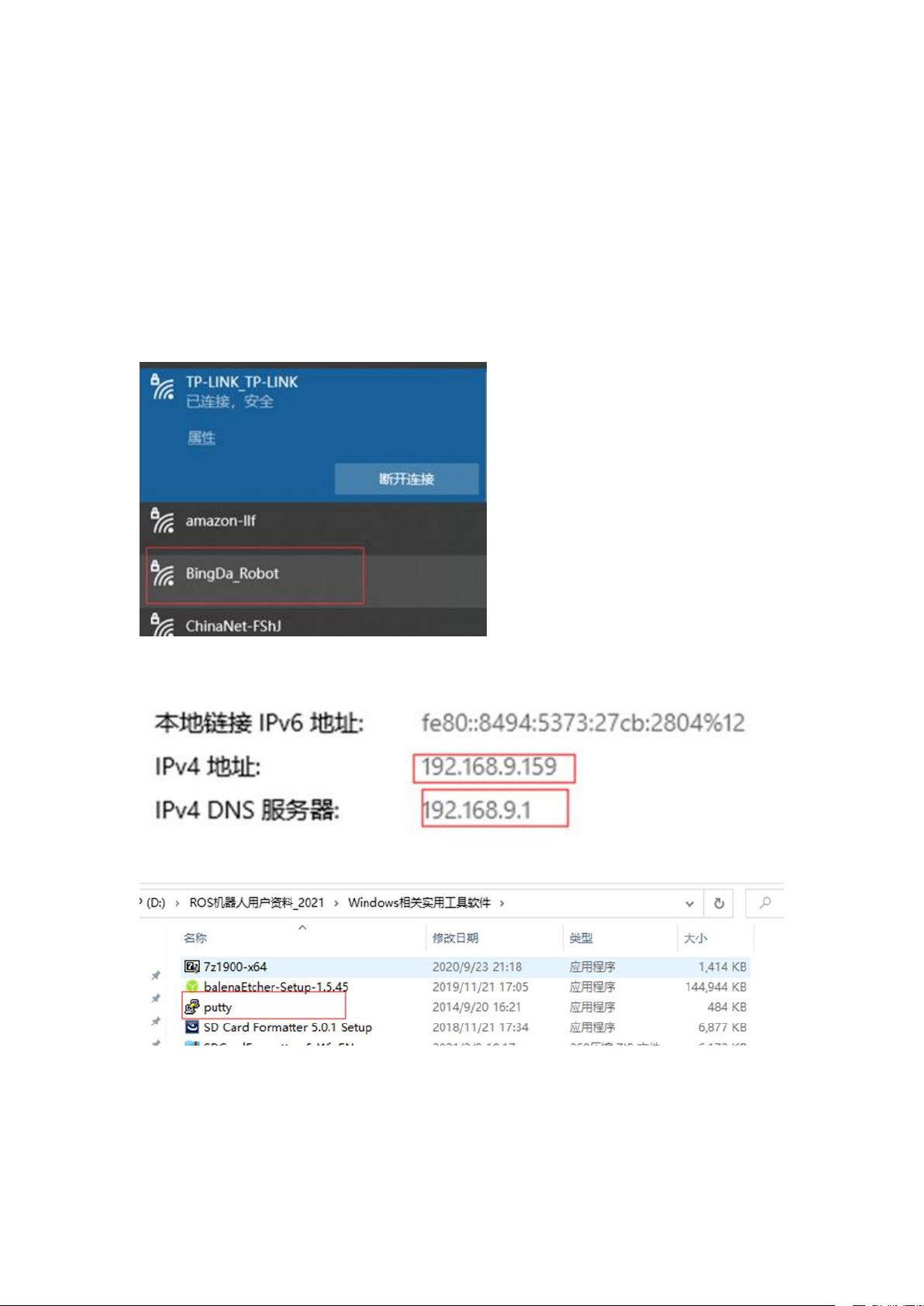
出厂时默认的无线模式就是 AP 模式;我们通过电脑搜索机器人热点,热点名默
认 BingDa_Robot,密码默认为 12345678
连接上机器人的热点之后就可以看到,电脑的 IP 为 192.168.9.159 这是机器人
分配的 IP 而下面的 192.168.9.1 就是机器人自身的 IP。
接下来在用户资料包里找到 putty 这个软件来登陆到机器人
打开软件后在 1 处填写机器人 IP,在 2 处我们取名为 BingDaRobot_AP 点击 3 处
保存。保存后下次再进入就可以直接双击机器人名进入登陆页面无需重新填写机
器人地址。
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-13 上传
2021-04-27 上传
2021-05-20 上传

河马的牙刷
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 进程与线程的管理 .PPT 进程、线程和优先级
- 第10章 控件.PPT 通用控件的创建和使用
- PLSQL高级编程资料
- EMI-EMC设计秘籍
- 单片机编程实例教程内含代码
- Learning Compressed Sensing
- Linux进程管理教程.pdf
- dac8032资料 pdf
- MapXtreme2005简介.doc
- MapXtreme2004应用问答.txt
- Head.First设计模式_PDF79-107.pdfg高清中文版
- Head.First设计模式_PDF高清中文版37-78.pdf
- C语言程序设计100例
- Head.First设计模式_PDF高清中文版
- Oracle9i 数据库管理基础1.1.pdf
- linux内核完全注释--赵炯
