改进灰狼优化在电动汽车电力系统控制中的应用:PI-PD控制器分析
3 浏览量
更新于2024-06-18
收藏 2.41MB PDF 举报
"这篇研究论文探讨了在插电式电动汽车(PEV)电力系统中,如何利用改进型灰狼优化(MGWO)算法提升自动发电控制(AGC)的性能。作者通过引入一种策略来平衡灰狼优化算法的探索与开发阶段,并优化迭代过程,以提高算法效率。经过与多种其他优化算法的对比,证明了MGWO算法在调整控制器参数方面的优越性。论文进一步将这种技术应用到传统控制器,如PI、PID和级联PI-PD控制器的调优,尤其是在处理PEV并网时的AGC问题。研究还扩展到了多区域电力系统,考虑了非线性因素,如机组速度限制、调速器死区和通信延迟。结果表明,MGWO技术能有效优化PEV在AGC系统中的频率控制,从而增强电力系统的稳定性。"
在插电式电动汽车电力系统中,自动发电控制(AGC)起着至关重要的作用,确保系统负荷与发电量的动态平衡,以减少频率波动。随着可再生能源和PEV的日益普及,AGC的复杂性增加,需要更智能的控制策略。灰狼优化(GWO)是一种生物启发式的全局优化算法,模拟狼群狩猎行为来解决优化问题。在本研究中,研究人员对原始GWO进行了改进,通过调整算法策略,使其在搜索空间的探索与开发之间达到更好的平衡,同时更多关注优秀解,增强了算法的收敛性和解决方案的质量。
实验部分,MGWO算法被用于调整串联PI-PD控制器的参数,这些控制器通常用于电力系统的AGC。与GWO、差分进化算法、引力搜索算法和粒子群优化算法比较后,结果显示MGWO在优化性能上具有优势。接着,研究将提出的MGWO技术应用于不同类型的控制器,包括简单的PI和PID控制器,以及更复杂的级联PI-PD控制器,以适应PEV的接入。
PEV的广泛使用带来了新的挑战,如非线性动态特性、实时通信延迟和设备限制。论文考虑了这些因素,并在多区域电力系统模型中应用MGWO优化的级联PI-PD控制器,进一步证明了这种方法的有效性。研究结果表明,使用MGWO优化的控制器能显著改善PEV并网后的AGC性能,有助于维持电力系统的稳定运行。
这项工作不仅提出了一个改进的优化算法,而且展示了其在电力系统控制,特别是PEV集成环境下的潜力。MGWO提供了一种工具,可以更好地调整控制器参数,以应对复杂的现代电力系统需求,这对于未来智能电网的发展具有重要意义。
430
S. Padhy
等人
/
工程科学与技术,国际期刊
20
(
2017
)
427
¼
jD
j
::
ð Þ
E t
Z
P
ð Þ
PEV的状态从充电状态到可控状态的变化,充电状态通过将N
个控制
电压乘
以平均充电电压得到。
控制
能量
(
C
ω
kwh
)。E
控制
能量
的表达式可以写为:
因此,在本研究中选择ITAE作为目标函数,其被写为:
伊塔伊
Z
T
SIM
¼
0
F tdt 5
E
plugout
是由于堵塞而导致的能量减少
图
E
LFC
是对应于负载频率控制信号的能量,并且通过积分局部中
心功率(
P
LFC
)而得到。
E
LFC
可以表示为:
其中,DF是频率偏差,t
sim
是仿真时间。
5.
优化技术
不
LFC
积分
榜
LFC
无
菌过
滤
器
灰狼优化算法(GWO)是一种典型的群体智能算法
4
算法,该算法的灵感来自于自然界中灰狼的领导等级和狩猎机制。在本节中,
概述了原始GWO技术及其改进版本,
4.
所提出的方法
电力系统的性能取决于控制器的结构和目标函数的选择本节详细
介绍了本研究中所采用的
4.1.
控制器结构
在自动发电控制中,一般采用积分控制器来减小区域控制误差。然
而,仅使用积分控制器的缺点是,它可能产生响应时间明显较慢的闭环
系统。比例积分(PI)不仅改善了系统的动态响应,而且还具有设计简
单、成本低等优点,适用于线性和稳定过程的系统。同时,对于高阶非
线性不稳定系统,传统的PI控制器一般不适用。
串级控制是提高系统性能的方法之一。由于串级控制器中的调谐
块的数量比非串级控制器中的调谐块的数量多,因此期望利用串级
控制系统改善系统性能
[32]
。由于串级
PI-PD
控制器的优点,近年来
在文献
[33]
中提出了用于控制系统的串级
PI-PD
控制器。由于其改善
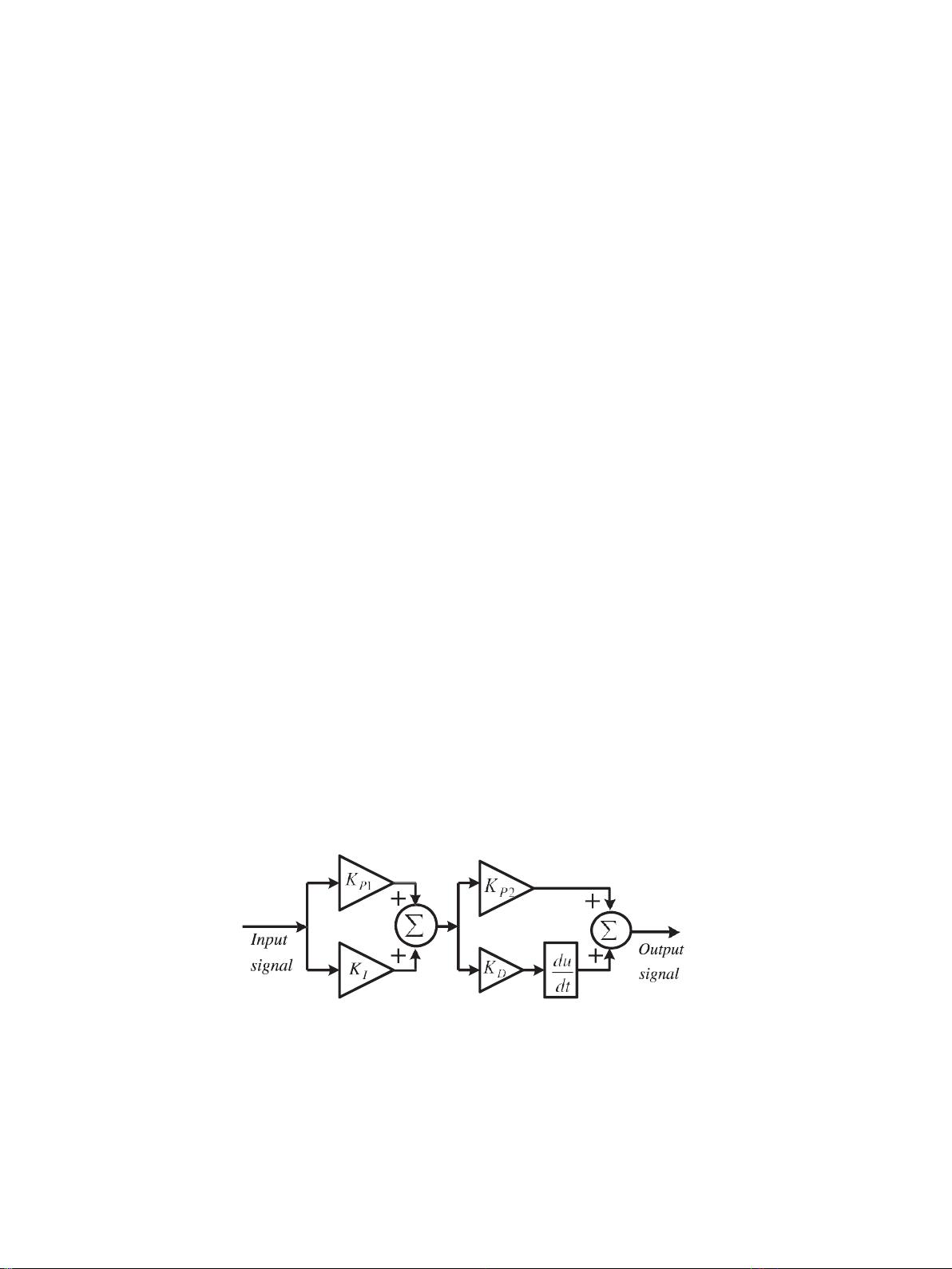
了系统性能,图
1
所示的级联
PI-PD
控制器。本研究选择了
4
号机组作
为
AGC
机组。控制输入信号是各个
ACE
,控制器输出是各个发电机
组的参考功率设置。
4.2.
目标函数
对于采用最优化方法的控制器设计,目标函数通常根据一些性能
指标来 确定,如 时间乘绝对 误差积 分(
ITAE
)、绝对 误差积分
(
IAE
)、平方误差积分
(ISE)和时间乘平方误差积分(ITSE)。
这些
目标函数的详细表达及其对系统性能的比较可参见文献
[21- 24
,
26
,
27]
。几项研究还表明,
ITAE
目标函数比其他替代方案提供了
更好的系统响应
[30
,
31]
。
已提供。
5.1. Grey Wolf Optimization
灰狼优化(GWO)是最近提出的一种Meta启发式优化技术,其动机
是灰狼的社会阶梯和狩猎行为[29]。GWO模仿灰狼的狩猎策略寻找和狩
猎解决方案 或者祈祷狩猎有三个主要步骤
1. 追踪(跟随),追逐(冲刺)和接近猎物。
2. 包围和骚扰猎物直到它停下来。
3. 攻击猎物。
在数学上,GWO算法表示如下:
5.1.1.
社会等级
就像 灰 狼的社 会阶 梯 (群 居)一 样,四 个群体 被定 义;即Alpha
(a),Beta(b),Delta(d)和Omega
(
x
)在GWO算法中,在设计阶段对狼的社会层次进行了建模。Alpha
是最合适的解决方案; Beta和Delta是第二和第三最佳解决方案。其余的
解决方案是最不重要的,被认为是欧米茄。
阿尔法类狼位于等级的顶端,是整个群体的领导者他们有决策
权,这是由集团遵循。贝塔狼是第二等级的狼,它们是阿尔法狼的下
属贝塔狼在决策过程中帮助阿尔法狼,以及其他群体行动。当阿尔法
狼死亡或变老时,它们就变成了阿尔法狼。欧米茄狼是存在于最低层
次的层次,总是遵循其他统治狼的决定。三角洲型狼总是跟随阿尔法
狼和贝塔狼,但支配着欧米伽狼。
5.1.2.
包围猎物
灰狼在祈祷周围的包围行为表现为:
~
D
j
~
C
·
~
X
P
t
-
~
X
t
j
6
见图4。串级PI-PD控制器的结构。
E
控制器 (
功率:0
:
8
:
B
ω
KW
:
N
控制器
(功率:
1
/
2 kWh
)
)
剩余15页未读,继续阅读
2021-05-29 上传
144 浏览量
2021-08-28 上传
2023-12-05 上传
2023-03-28 上传
2024-10-31 上传
2024-11-09 上传
2023-04-07 上传
2023-08-30 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
