ERDAS影像融合技术详解
下载需积分: 50 | DOC格式 | 773KB |
更新于2024-09-09
| 186 浏览量 | 举报
"本文档详细介绍了ERDAS软件中影像融合的操作流程,涵盖了在影象解译模块(Interpreter)和雷达影象处理模块中的不同步骤,重点解析了在影象解译模块中的Resolution Merge和Wavelet Resolution Merge两种融合方法,包括各方法的参数设置和融合方法的选择。"
在遥感和地理信息系统领域,ERDAS是一款强大的图像处理软件,能够进行多种复杂的图像分析和处理任务,其中包括影像融合。影像融合是将不同分辨率、不同传感器获取的图像进行整合,以提高图像的整体质量和解析度。本文档主要聚焦于ERDAS的影像融合操作流程。
首先,在影象解译模块(Interpreter)中,进行影像融合主要有两种方法:Resolution Merge和Wavelet Resolution Merge。Resolution Merge主要用于融合具有不同分辨率的多光谱图像,例如将高分辨率的Panchromatic图像与低分辨率的多光谱图像融合。
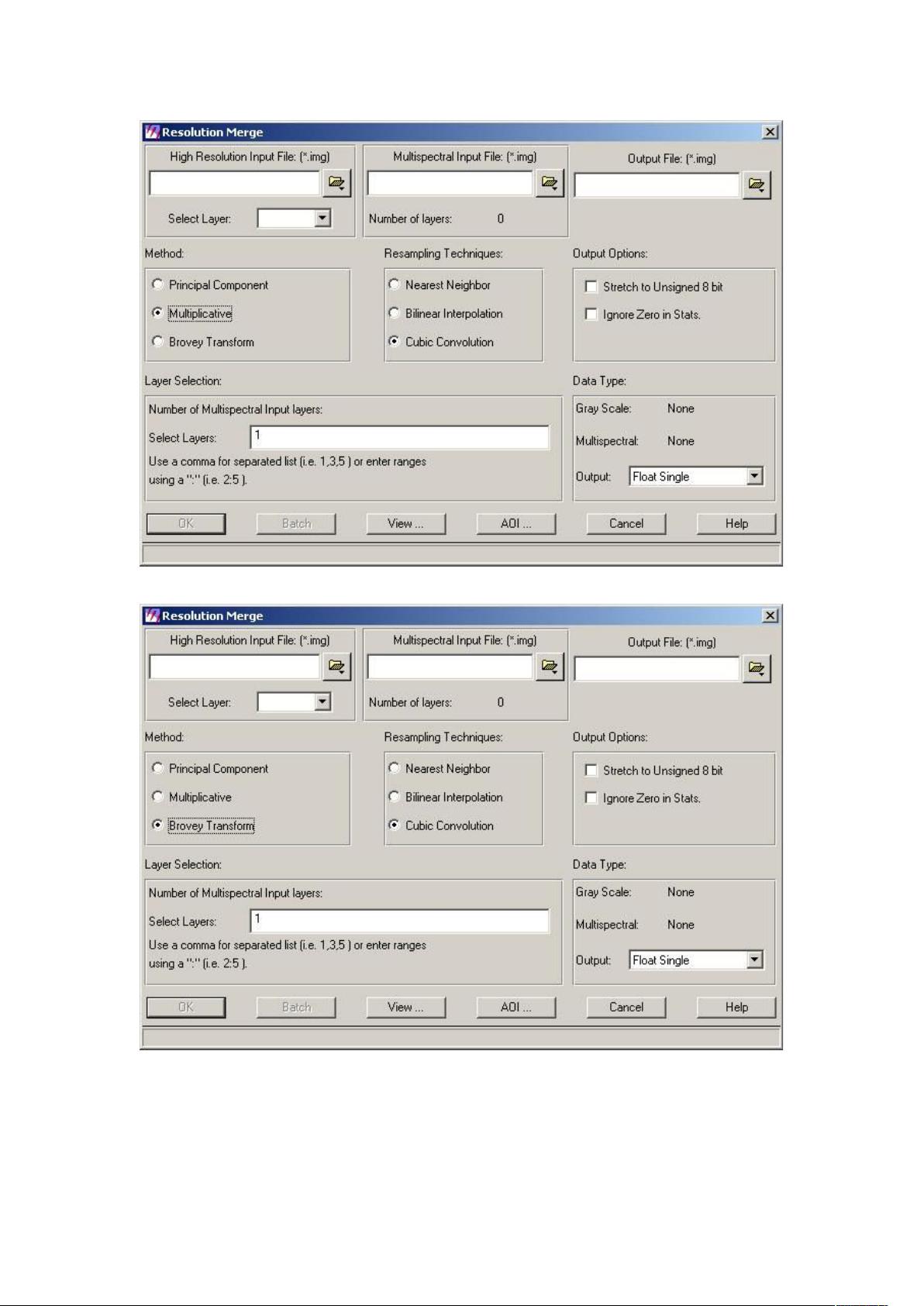
在Resolution Merge中,用户需要设置的关键参数包括:
1. 高分辨率输入文件:指定提供高分辨率信息的图像。
2. 影像波段选择:选择参与融合的波段。
3. 多光谱输入文件:用于融合的低分辨率多光谱图像。
4. 输出文件定义:设置融合后的图像保存路径。
5. 融合方法:有Principal Component(主成分变换法)、Multiplicative(乘积变换)和Brovey Transform(比值变换)三种,每种方法都有其适用场景和效果差异。
6. 重采样方法:选择Nearest Neighbor、Bilinear Interpolation或Cubic Convolution,其中Cubic Convolution通常能提供更平滑的结果。
7. Output Options:如忽略零值像素。
8. Layer Selection:设定输出图像的波段组合。
9. DataType:设置输出图像的数据类型。
10. 执行操作:点击OK按钮启动融合过程。
除了Resolution Merge,还有Wavelet Resolution Merge,这种方法利用小波理论进行融合,能够更好地保留图像的细节信息。设置参数与Resolution Merge类似,但可能需要额外调整小波相关的参数。
在雷达影象处理模块中,由于雷达图像的特点,融合效果可能会优于影象解译模块。不过,具体操作和参数设置未在描述中详述,可能需要参考ERDAS的用户手册或其他相关文档。
ERDAS的影像融合功能为用户提供了一套灵活且强大的工具,可以根据实际需求选择合适的融合方法和参数,以优化图像的质量和信息含量。理解和掌握这些操作流程对于遥感图像分析和应用至关重要。
Multipalcative(乘积变换)
Brovey transform(比值变换)
(6) 选择重采样方法。系统提供了两种重采样方法 Nearest Neighbor(邻近像元
法)、Bilinbear Interpolation(二次线形内插)和 Cubic Convolution(立方卷
积)。其中以 Cubic Convolution 方法最为平滑。
(7) 确定 Output Options 输出图象选项。选择 Lgnore Zero Stats,可以忽略像素值为
剩余10页未读,继续阅读
相关推荐



pj9292
- 粉丝: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- OctoPrint-TPLinkSmartplug插件的固件兼容性问题及解决方案
- Windows API系统托盘实例详解与交流指南
- Oracle EBS TRM技术参考手册解析
- 探索纯HTML5拓扑图编辑器源代码的无限可能
- ARKit实现裸手指空中绘画:Swift开发实战
- org.json JSONObject依赖的jar包及其版本号
- Bandicam 1.8.7.347:游戏录屏新选择,体积小音质佳
- MATLAB图像处理技术实现螺纹识别项目源代码
- 如何有效使用Window Installer Clean Up工具
- 聚合物Web组件简化D2L界面控制方法
- Tyra: 专为SEO优化的女性风格Gatsby启动器
- Windows NT 2000原生API参考手册下载
- 高效UDP日志传输:客户端与服务端代码实现
- 实现Android淡入淡出效果的欢迎界面教程
- uLog:嵌入式系统轻量级日志记录解决方案
- ARM裸奔环境下C库应用与Makefile实现指南
