工业机器人坐标转换详解:算法、步骤与实现
需积分: 32 23 浏览量
更新于2024-09-13
5
收藏 106KB PDF 举报
工业机器人设计中的坐标转换是其运动控制的关键环节,它涉及到不同坐标系之间的变换,以便机器人能在复杂的工作环境中准确执行任务。本文将深入探讨坐标转换的算法原理和其实现方法。
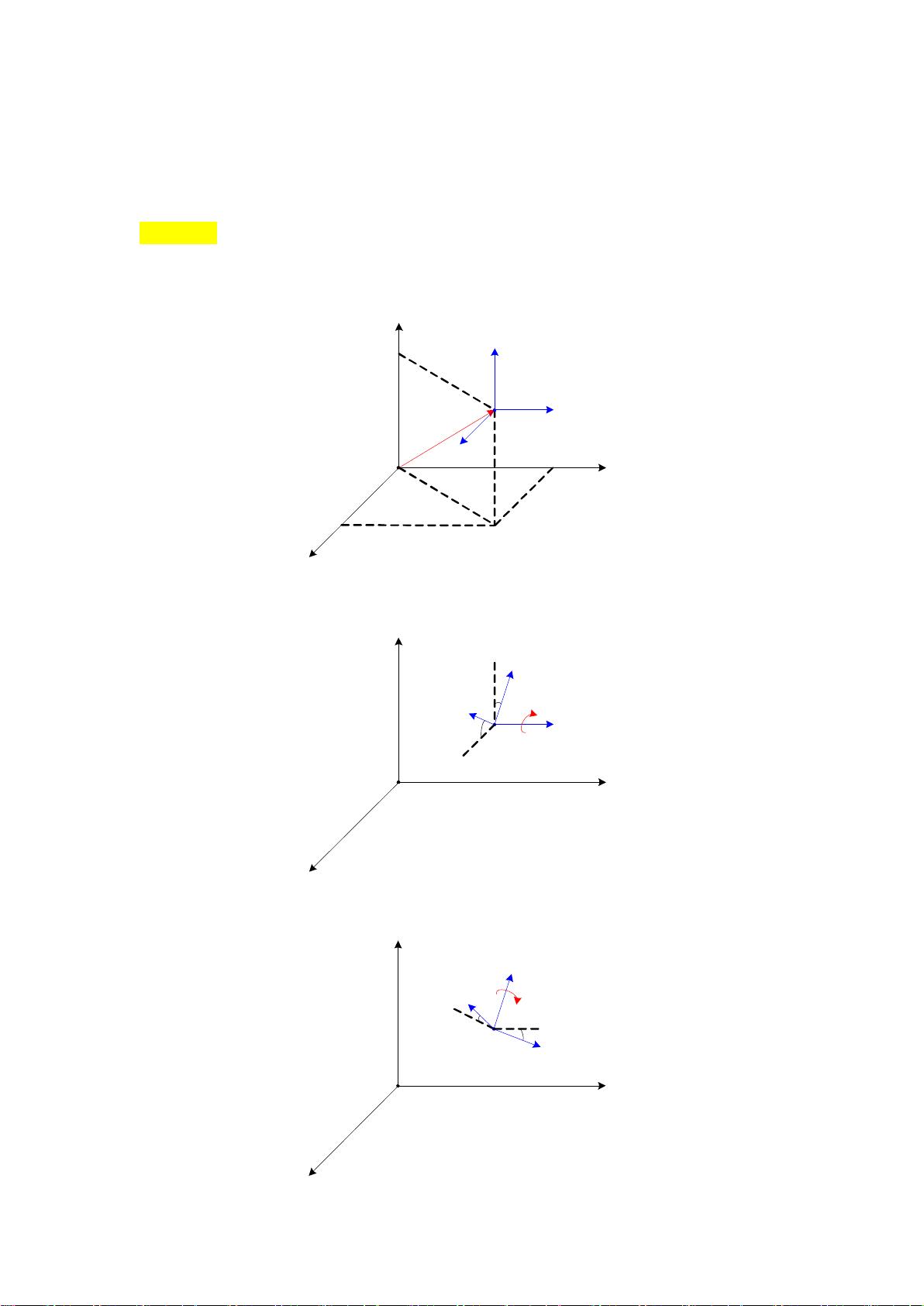
首先,我们定义了一个基础坐标系Fb,其原点为Ob,坐标轴分别为Xb、Yb和Zb。为了方便操作,我们需要对Fb进行一系列变换,包括平移和平移向量po(xo, yo, zo),旋转步骤则包括沿Yb轴旋转角度p,然后沿Zb轴旋转角度r,最后沿Xb轴旋转角度w,这些操作会依次生成坐标系Fb1、Fb2、Fb3,直到Fn(On,xn,yn,zn)。这种变换遵循XYZ的旋转顺序,确保了变换的连贯性。
在Fn坐标系中有一个点Pn(xpn, ypn, zpn),目标是找到该点在原始坐标系Fb中的坐标Pn(xpb, ypb, zpb)。解决这个问题的关键在于理解变换矩阵的构建。坐标转换的过程通过矩阵乘法实现,例如旋转矩阵Qy、Qz和Qx分别对应Y轴、Z轴和X轴的旋转,它们的组合形成一个总的旋转矩阵bQn。
(1) 转换矩阵的计算:从Fb到Fn的旋转过程可以用三个旋转矩阵相乘来表示,即bQn = Qy * Qz * Qx。这里,Qy、Qz和Qx分别是绕Y、Z和X轴的旋转矩阵,它们的元素与旋转角度p、r和w有关。通过矩阵运算,可以得出从Fn到Fb的坐标变换公式,涉及三角函数的计算。
(2) 坐标投影:在Fb坐标系中,点Pn的坐标投影pb实际上是向量pb在Fb坐标系的投影,可以通过点Pn在Fn坐标系中的向量pn和变换矩阵bQn的关系来计算。投影的坐标(xpb, ypb, zpb)可以通过向量相加和投影运算得出。
总结来说,工业机器人的坐标转换是通过一系列的平移和旋转操作,用数学模型(如旋转矩阵)精确地将一个坐标系的点映射到另一个坐标系。这个过程对于机器人的路径规划、定位精度以及末端执行器的操作至关重要。实际编程时,开发者通常会利用这些理论,编写出高效的坐标转换程序,以确保机器人能够按照预设的轨迹和精度执行任务。
1
坐标转换分析
1.
1.
1.
1. 算法原理
命题 1 :存在坐标系 Fb ( Ob , xb , yb , zb ) ,现对 Fb 操作如下:
1. 平移向量 po[xo , yo , zo]
T
Fb
,得到 Fb
1
( Ob
1
, xb
1
, yb
1
, zb
1
)
po
xo
yo
zo
Zb
Yb
Xb
Zb
1
Yb
1
Xb
1
Ob
Ob
1
2. 沿 Yb
1
轴旋转角度 p ,得到 Fb
2
( Ob
2
, xb
2
, yb
2
, zb
2
)
Xb
Yb
Zb
Zb
2
Yb
2
Xb
2
Ob
Ob
2
P
3. 沿 Zb
2
轴旋转角度 r ,得到 Fb
3
( Ob
3
, xb
3
, yb
3
, zb
3
)
Xb
Yb
Zb
Zb
3
Yb
3
Xb
3
Ob
Ob
3
r
下载后可阅读完整内容,剩余8页未读,立即下载
2020-01-10 上传
2021-08-11 上传
2014-08-22 上传
2021-08-11 上传
2021-10-05 上传
2022-11-11 上传
2021-10-05 上传

liaizun
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
