分布式有限时间卡尔曼滤波:最大共识协议
144 浏览量
更新于2024-08-26
收藏 1.37MB PDF 举报
"有限时间最大共识协议的分布式卡尔曼滤波"
本文主要探讨的是在稀疏连接的传感器网络中,如何解决动态工厂的状态估计问题。在这样的网络中,虽然所有传感器可以共同观察工厂的整体动态,但并非每个传感器都能独立地观测到全部状态。针对这个问题,作者提出了一种基于有限时间最大共识的分布式估计器。这个算法巧妙地解决了局部不可观测性的挑战,为共识迭代提供了精确的时间界限。
有限时间最大共识协议的核心在于,它能在预设的时间内使网络中的所有节点达成一致,即所有传感器最终对状态估计达成共识。在分布式卡尔曼滤波的框架下,这一共识机制确保了即使传感器之间的通信网络存在不均匀的时变延迟,也能稳定地进行状态估计。文中证明了所提出的估计器是稳定的,并且其均方误差与中心化的卡尔曼滤波器相当,这意味着分布式方法在精度上并不逊色于集中式方法。
为了应对通信延迟的问题,文章中引入了虚拟节点作为中继,通过它们来协调和传递信息,从而保证算法的稳定运行。这一策略有效地缓解了实际网络中由于延迟导致的性能下降。
此外,仿真实验部分进一步证实了提出的分布式有限时间共识滤波器的有效性。通过对比分析和实际应用案例,展示了算法在不同环境和条件下的性能,验证了其在处理动态系统状态估计时的高效性和准确性。
该研究工作得到了国家自然科学基金以及江苏省自然科学基金的支持。论文的发表对于理解分布式系统中的状态估计问题,特别是面对不稳定动态系统和通信延迟时的挑战,提供了重要的理论基础和实用解决方案。对于未来在传感器网络、物联网、自动化系统等领域中的分布式估计和控制设计具有重要的指导意义。
Received November 20, 2017, accepted January 27, 2018, date of publication February 27, 2018, date of current version March 15, 2018.
Digital Object Identifier 10.1109/ACCESS.2018.2809451
Distributed Kalman Filtering With Finite-Time
Max-Consensus Protocol
PENG LIU , YU-PING TIAN, AND YA ZHANG
School of Automation, Southeast University, Nanjing 210096, China
Key laboratory of Measurement and Control, Department of Computer Science and Engineering, Ministry of Education, Southeast University,
Nanjing 210096, China
Corresponding author: Yu-Ping Tian (yptian@seu.edu.cn)
This work was supported in part by the National Natural Science Foundation of China under Grant 61573105 and Grant 61473081,
and in part by the Natural Science Foundation of Jiangsu Province under Grant BK20141341.
ABSTRACT This paper investigates the distributed state estimation problem for an unstable dynamic plant
in a sparsely strongly connected sensors network. The dynamics of the plant are collectively observable for
all sensors, but not necessarily locally observable for each sensor. We propose a finite-time consensus-based
distributed estimator to cope with the local unobservability. This algorithm is based on the max-consensus
technique, and the number of consensus iterations is precisely provided. We prove that this estimator is stable
and the mean-squared error is equal to that obtained by the centralized estimator. Furthermore, we extend this
finite-time consensus Kalman filtering algorithm to networks with nonuniform time-varying communication
delays. By introducing the virtual nodes, which act as the relay nodes, we prove the stability of the algorithm.
Finally, the effectiveness of the proposed distributed finite-time consensus filters is evaluated by simulation
experiments.
INDEX TERMS Distributed Kalman filter, communication delays, finite-time consensus, max-consensus.
I. INTRODUCTION
For the past decades, sensor networks have received
significant attention of many researchers. The networks
are composed of tiny, power-constrained nodes with sens-
ing, computation, and wireless communication capabilities.
These nodes are usually distributed spatially to process a
limited amount of data, such as monitoring of environmental
attributes [1], [2], estimating the state of power networks [3],
tracking the moving objects by the camera networks [4], [5]
and distinguishing the orbital debris using radars and optical
telescopes [6]. The features of energy and channel capac-
ity constraints render the centralized estimator impractical,
which motivates researchers to focus on the distributed esti-
mation protocols. The advantages of the distributed proto-
cols include the scalability for large-scale networks and high
fault tolerance. For distributed estimation problem, multiple
sensors can sense the target (or plant), each sensor may get
partial or no measurements related to the state of a target.
The aim of a distributed estimator is to reconstruct an esti-
mate of the target’s state using its local measurement and
its neighbor’s information in the network without requiring
a centralized node for information fusion. An agreement
on the gathered information can be reached via consensus
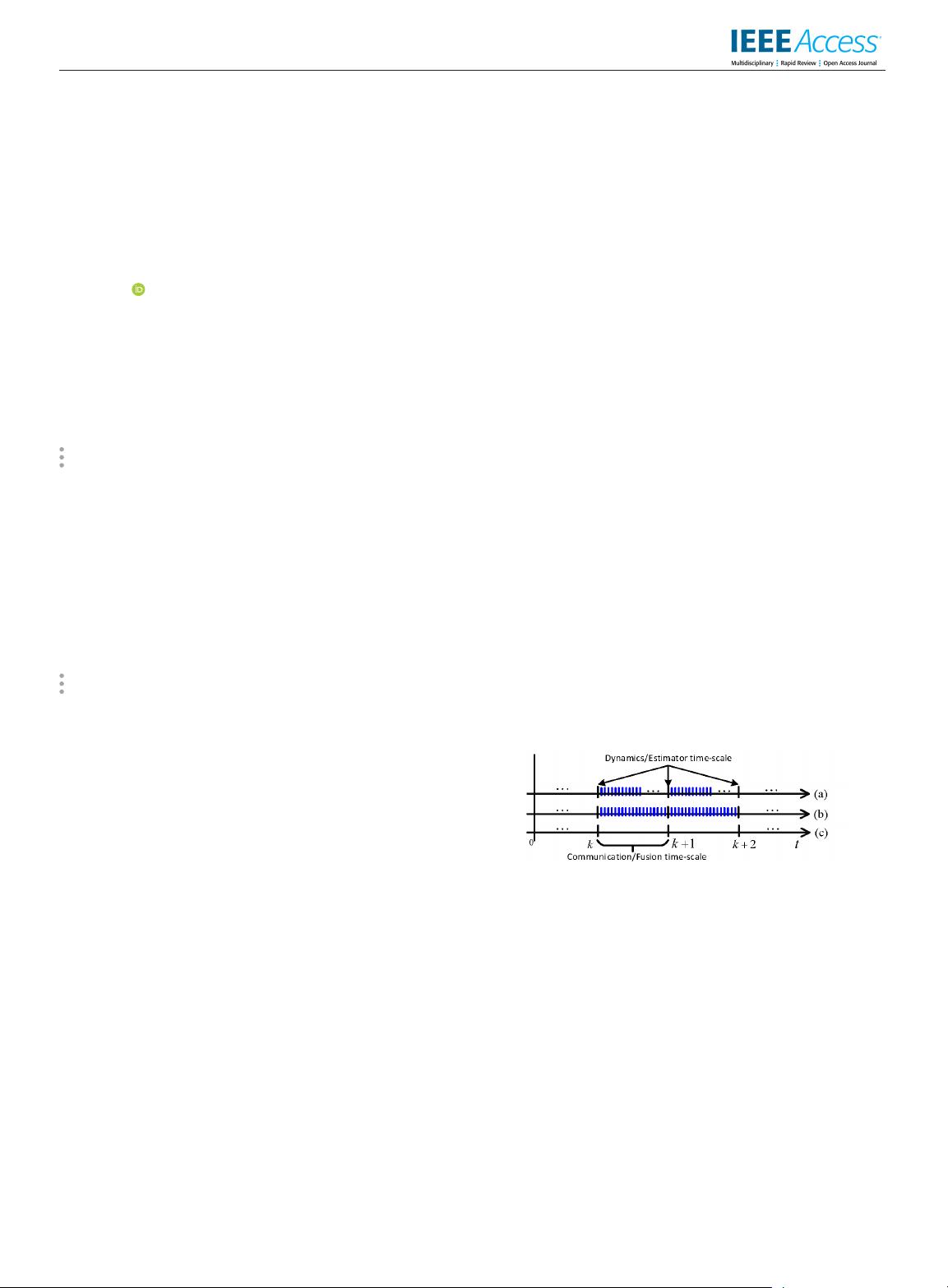
FIGURE 1. Three different time-scales.
algorithms. Consensus protocols are extensively studied
in formation of multi-agent, distributed estimation, and
distributed optimization problems, etc. Generally speaking,
consensus problem is different from the term distributed
estimation, which refers to using the consensus algorithms
for finding the best estimate of the target. This paper studies
the distributed filtering algorithms with finite-time consensus
strategy.
Distributed estimators (such as distributed Kalman filter
and its transformed forms) for dynamic systems have gained
considerable attention [7]–[10]. The existing research on
distributed estimation can be classified into two categories
based on the principle of operation: 1) two time-scale: fast
communication-slow dynamics and sensing, see Fig.1.(a) and
VOLUME 6, 2018
2169-3536 2018 IEEE. Translations and content mining are permitted for academic research only.
Personal use is also permitted, but republication/redistribution requires IEEE permission.
See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
10795
下载后可阅读完整内容,剩余7页未读,立即下载
2024-03-31 上传
679 浏览量
547 浏览量
166 浏览量
239 浏览量
433 浏览量
281 浏览量
140 浏览量

weixin_38655011
- 粉丝: 9
- 资源: 916
 我的内容管理
展开
我的内容管理
展开







最新资源
- pattern in java
- java环境变量配置
- EN_62106-2001.pdf
- aspsqlscript
- A Guide to MATLAB Object-Oriented Programming -By Andy H. Register
- PIC24FJ1280使用手册
- DVD 与外部MCU通讯协议
- JSP笔记(doc格式)
- DOS常用命令,chg专业收集
- ‘the c++ standard’ 的 draft
- 关于ALV的最详细的汇总,包含各种功能
- excel转gis格式
- Linux Web Hosting with WebSphere,DB2,and Demino
- 基于vhdl的洗衣机控制器
- 基于vhdl的电子时钟设计
- Java面试经典100题(PDF)
