蛇形机器人曲线路径跟随控制
133 浏览量
更新于2024-08-26
收藏 1.42MB PDF 举报
"这篇研究论文探讨了蛇形机器人如何沿着任何曲线路径移动,提出了一个创新的路径跟随控制器设计。该控制器结合了独轮机器人使用的鲁棒跟随控制器与蛇形机器人的纤维束模型,旨在使蛇形机器人能有效地跟踪平面内的任意曲线。论文首先基于纤维束理论建立了蛇形机器人的运动学模型,这一理论将蛇形机器人与独轮机器人联系起来。接着,对独轮机器人的鲁棒路径跟随控制器进行了修改,使其适用于蛇形机器人。为了实现这一控制器的可行性,论文还提出了一种估算纤维束中机器人方向角的方法。通过数值模拟和实验验证了所提方法的有效性和鲁棒性。关键词包括蛇形机器人、路径跟随控制。"
在本文中,研究人员面临的主要挑战是蛇形机器人由于其冗余自由度而带来的复杂控制问题。蛇形机器人通常拥有多个关节,可以灵活地在各种环境中移动,但这也使得设计一个稳健的路径跟随控制器变得困难。为了解决这个问题,作者采用了纤维束理论来建立机器人的运动学模型。纤维束模型是一种描述具有多个自由度系统的方法,能够捕捉到蛇形机器人复杂运动的特性,并将其与简单的独轮机器人模型相联系。
论文提出的控制器融合了独轮机器人的路径跟随策略,这是一种已知的、经过验证的鲁棒控制方法。通过对这一控制器进行适应性修改,使其适用于蛇形机器人的运动学特性,研究人员得以设计出一种新的路径跟随控制器。控制器的核心目标是在保持蛇形机器人稳定的同时,使其能够精确地沿给定的平面曲线路径行进。
为了实现这一目标,论文还提出了一种估算机器人在纤维束模型中的方向角的方法。这个估计过程对于确保控制器的正确运行至关重要,因为它允许机器人实时调整其姿态以适应路径的变化。数值模拟和实验结果均表明,提出的路径跟随控制器在跟踪复杂曲线路径时表现出良好的性能和鲁棒性,验证了这种方法的有效性。
这篇研究论文为蛇形机器人沿着任意曲线路径移动提供了新的解决方案,这对于拓展蛇形机器人在狭小空间、复杂地形或者需要高精度运动控制的应用领域具有重要意义,如搜救任务、医疗操作以及环境探索等。
Any Curve Path Following of Snake-like Robots
Xian Guo, Wei Zhu, and Yongchun Fang
Institute of Robotics and Automatic Information Systems
University of Nankai
Tianjin,300350 China
fangyc@nankai.edu.cn
Abstract— Because of redundant freedoms, designing a robust
any path following controller for snake-like robots is very
challenging. In this paper, a novel path following controller,
combining the robust following controller used in the unicycle
robot and the fiber bundle model of snake-like robots, is
proposed to follow any planar curve. More specifically, firstly,
the kinematic model is established based on the fiber bundle
theory which connects snake-like robots and unicycle robots.
Then the robust path following controller for the unicycle
robots is modified to be applied to the sake-like robots. Finally,
to obtain a feasible controller, an estimation method for the
orientation angle of the robot in the fiber bundle is proposed.
To validate the proposed method, numerical simulations and
experiments are performed. The results demonstrate that the
proposed following controller is robust and valid.
Index Terms— Snake-like robots, Path following, Geometric
mechanics, Any planar curve.
I. INTRODUCTION
Since 1970s, the research about snake-like robots has
attracted wide and lasting attentions of scholars from all
over the world, because the snake-like robots can move in
various environments such as land, ocean, forest, desert, etc.
The main topics are focused on methods how to generate
various gaits to adapt to different environments. Among
these methods, three methods are commonly used: curve-
based method [1], CPG-based method [2], and model-based
method [3] [4]. These works are very useful and have
brought about many achievements, such as swimming, climb-
ing pipelines, searching and rescuing in disastrous sites.
However, the control used in most of these work is either
semi-automatic or completely manual, meaning the robots
lack in autonomy. Generally speaking, path planning and
path following methods are needed for a fully autonomous
robot. Firstly, a desired path connecting the start point and
the end point is derived by path planning methods such as
graph search based methods [5] [6], sampling-based methods
[7] [8], interpolating curve based methods[9] or numerical-
optimization-based methods [10]. Then, a closed-loop path
following controller is designed to enable the robot to track
∗
This work is supported by National Natural Science Foundation
of China(GrantNo.61603200,GrantNo.U1613210) X. Guo, W. Zhu and
Y. Fang are with the Institute of Robotics and Automatic Informa-
tion Systems, Nankai University, Tianjin 300350, China (e-mail: guox-
ian@nankai.edu.cn;zhuwei@mail.nankai.edu.cn; fangyc@nankai.edu.cn)
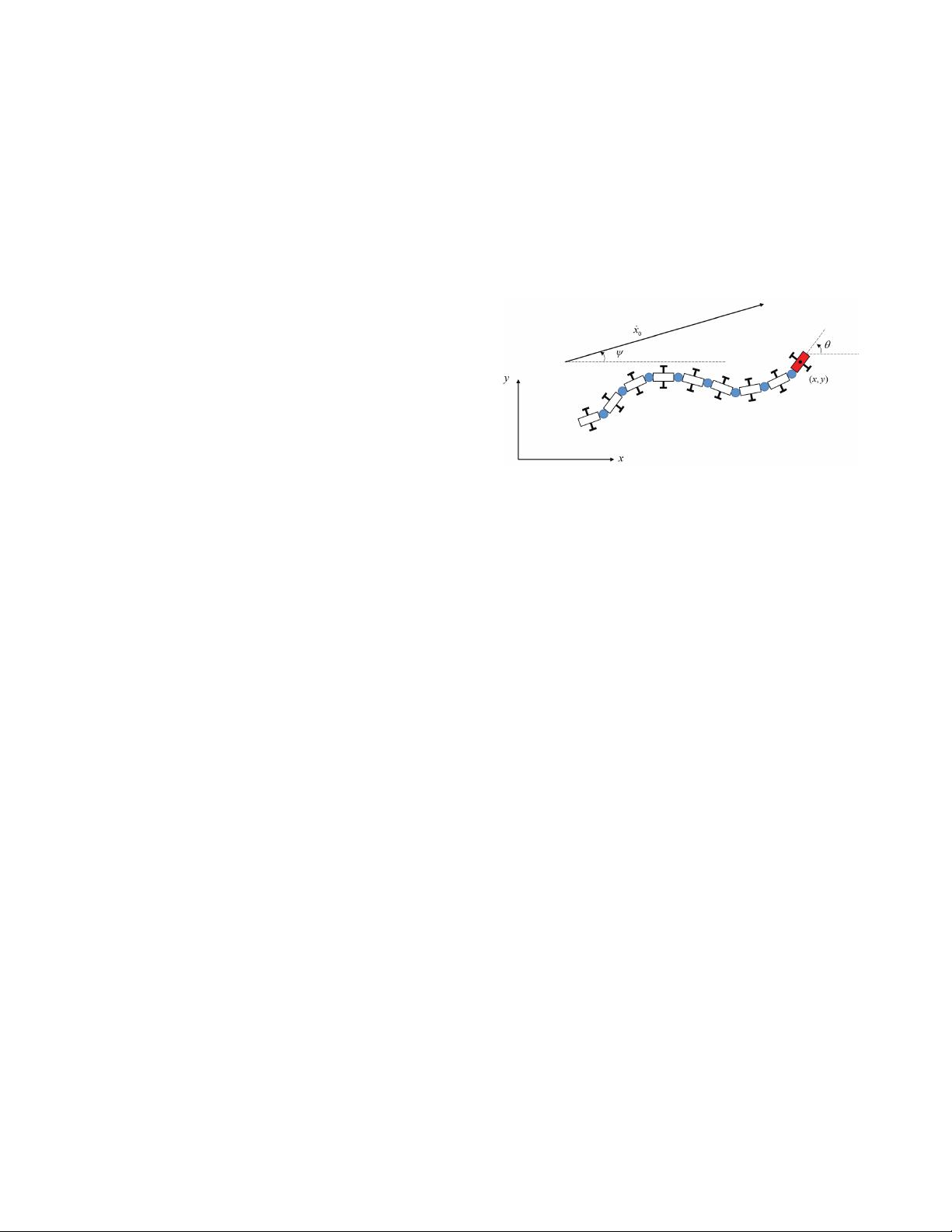
Fig. 1. Snake-like robots with passive wheels. The coordinates of the head
is (x, y, θ). ˙x
0
denotes the velocity of the snake robots, and ψ denotes the
turning angle of the whole snake-like robot.
the desired path. Additionally, the path following method is
also needed when a specified curve is given to finish some
special task. In this paper, the topic about path following for
snake-like robots is discussed.
In fact, path following methods have been deeply re-
searched for the unicycle vehicle. The most popular one is
the projection method such as LOS (Line-of-Sight) Guid-
ance method[11] and Integral Line-of-Sight Guidance method
[12], in which the projection point on the desired path
is firstly computed together with the distance and angular
errors being recalculated, then various nonlinear controller
is designed based on Lyapunov function or sliding mode
techniques [13]. For a simple curve following, they work
very well. However, there is one critical drawback to these
methods: the projection point must be unique which requires
the initial point can not be too far from the desired curve and
the desired curve can not be too complex. In order to solve
the non-uniqueness of the projection method, a virtual target
method is proposed, in which an explicit progression rate of
the moving target method is tracked [14]. Unfortunately, the
asymptotic convergence to the path can not be guaranteed.
Morro proposes a new feedback control model which can
guarantee asymptotic convergence to any 2-D curve neither
requiring the projection nor considering a moving virtual
target[15]. However, the controller is only applicable to
unicycle robots.
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-04-26 上传
2012-05-20 上传
2021-08-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38726407
- 粉丝: 20
- 资源: 954
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
