μC/OS-II操作系统下的FlexRay线控转向系统设计
124 浏览量
更新于2024-08-31
收藏 292KB PDF 举报
"基于μC/OS-Ⅱ的Flexray线控转向系统的实现"
线控转向系统(Steering By Wire,SBW)是汽车动力系统中的一种先进技术,它通过电子信号替代传统的机械连接,实现车辆的转向控制。FlexRay总线是这类系统的关键通信组件,因为它提供了高速、可靠的通信能力,满足了线控转向系统对实时性和安全性的严格要求。
FlexRay总线技术是一种高级的汽车通信协议,它具备双通道传输能力,每个通道的最高数据传输速率可达10Mb/s,远超其他车载通信总线。这种高速传输能力使得FlexRay能够处理大量实时数据,适用于需要快速响应的汽车控制系统,如线控转向。此外,FlexRay还支持多种网络拓扑结构,如星形、树形和总线形,适应性强,可应对复杂的车辆网络环境。
在FlexRay通信协议中,物理层负责电气信号的传输,传输层处理帧的编码和解码,表示层则控制通信状态的切换,确保协议的正确执行。应用层则是用户接口,允许系统开发者根据具体需求实现相应的功能。通信状态包括配置、就绪、唤醒、启动、正常和暂停等,这些状态间的转换严格遵循预定义的流程,以保证网络的稳定运行。
在本文的设计中,采用了μC/OS-II实时操作系统,这是一个轻量级、可移植的实时操作系统,特别适合资源有限的嵌入式系统。通过μC/OS-II的多任务调度机制,可以有效地分配和管理系统资源,避免死锁的发生。同时,引入通信故障检测报警功能,增强了系统的容错性和安全性,当FlexRay通信出现异常时,系统能够及时报警并采取相应措施,这对于线控转向系统的可靠性至关重要。
在实际应用中,FlexRay的配置状态是网络初始化的关键阶段,包括节点配置和通信任务初始化。一旦配置完成,系统进入就绪状态,准备进行通信。在就绪状态下,系统可以唤醒未参与通信的节点,或在接收到启动命令后与FlexRay网络时钟同步,确保所有节点在同一时间基准下工作。启动成功后,系统进入正常状态,开始执行预定的通信任务,确保线控转向的精确控制。
基于μC/OS-II的FlexRay线控转向系统设计克服了传统方法的局限,通过实时操作系统实现了高效、可靠的通信,并通过故障检测机制提升了系统的健壮性。这一设计不仅满足了线控转向系统的实时性需求,也为未来汽车电子系统的开发提供了宝贵的实践经验。
基于基于μC/OS-Ⅱ的的Flexray线控转向系统的实现线控转向系统的实现
本文基于μC/OS-II操作系统,设计了线控转向中FlexRay总线的通信部分。在满足实时性要求的基础上,利用
其多任务的特点,节约了系统资源,避免了死锁问题的出现,并增加了通信故障检测报警功能,为今后开发线
控转向系统奠定了基础。
引言引言
近年来,随着汽车工业和电子工业的不断发展,汽车
FlexRaY是时间触发的通信总线,对实时性要求较高,因此仅仅依靠由简单循环和中断服务程序组成的嵌入式程序将无法
满足要求。同时,FlexRay通信在启动和运行过程中,需要利用循环对总线状态进行查询,既浪费大量的系统资源,又容易造
成程序死锁,成为应用中的难点问题。
基于上述问题,本文基于μC/OS-Ⅱ操作系统,设计了线控转向中FlexRay总线的通信部分。在满足实时性要求的基础上,
利用其多任务的特点,节约了系统资源,避免了死锁问题的出现,并增加了通信故障检测报警功能,为今后开发线控转向系统
奠定了基础。
1 FlexRay总线技术总线技术
为了满足汽车线控技术的需求,FlexRay联盟于2005年发布了FlexRay总线协议。其主要特点有:双通道传输,每个通道
的传输速率高达10 Mb/s;具有灵活的使用方式,支持多种网络拓扑结构;负载率高;提供冗余机制。
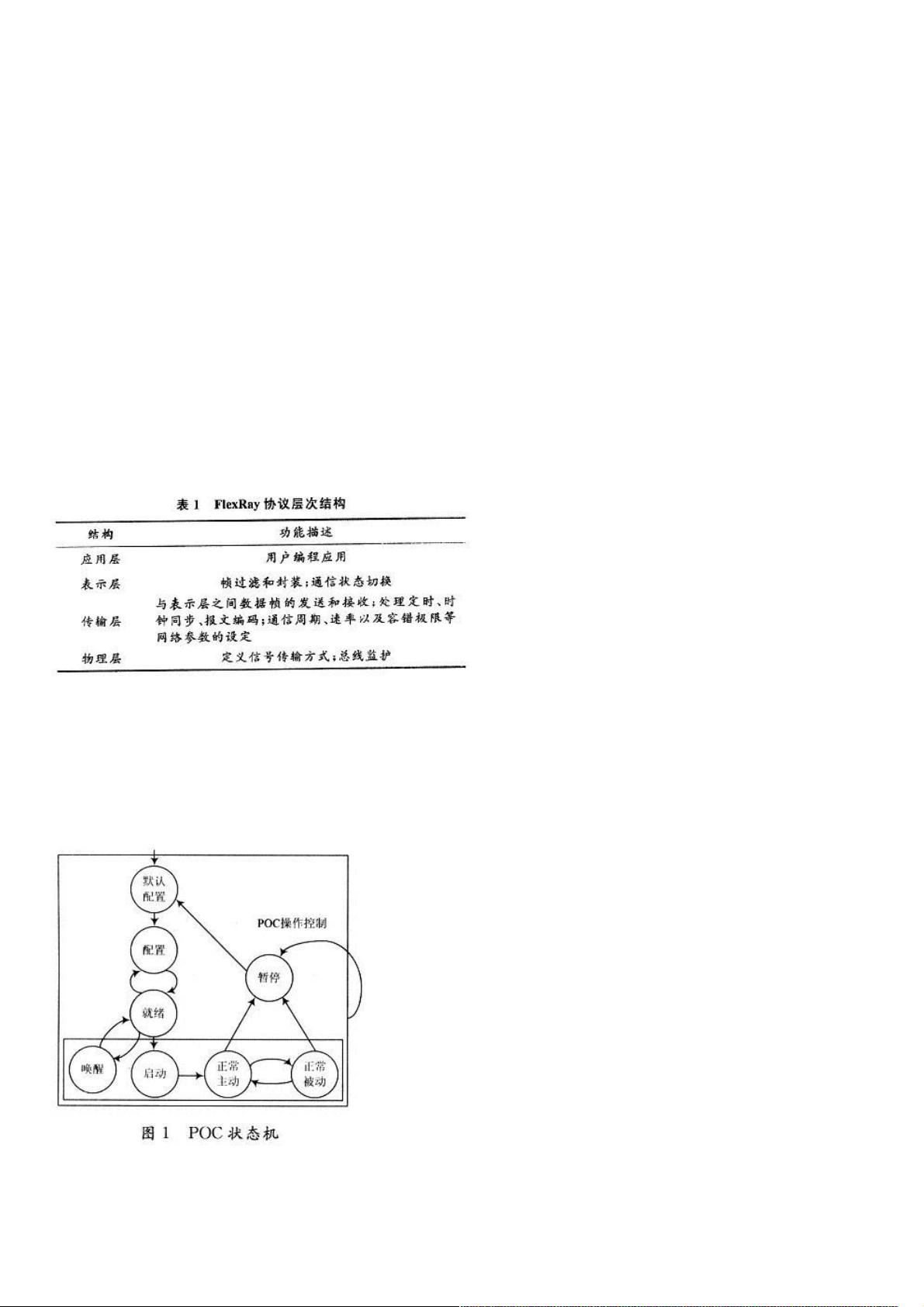
从开放式系统互连参考模型角度来看,FlexRay通信协议定义了四层结构:物理层、传输层、表示层和应用层,各层功能
描述见表1。表示层中,通信状态切换控制整个FlexRay通信的运行过程,具有十分重要的作用。
FlexRay协议操作控制(Proposal Operation Control,POC)将通信状态分为几种状态,分别为:配置状态(默认配置、配
置);就绪状态;唤醒状态;启动状态;正常状态(正常主动、正常被动);暂停状态。其状态转换图如图1所示。当控制器主机
接口(Controller Host InteRFace,CHI)给通讯控制器(CC)发送命令后,CC从暂停状态进入默认配置状态,满足配置条件后进
入配置状态,完成网络初始化和节点通信任务初始化;之后可以进入就绪状态,完成节点内部通信设置,如果没有满足通信就
绪条件,就返回配置状态继续配置;在就绪状态,CC可以发送唤醒帧,唤醒网络中没有在通信的节点,也可以获得CPU的启
动通信命令,完成与FlexRay网络时钟同步;启动成功后进入正常状态,完成数据的收发;当出现错误时,可由正常状态进入
暂停状态,重新等待CHI命令。
由此可见,控制器需要按照POC状态进行相应操作,因此会出现对POC状态的循环检测,容易造成程序死锁以及占用大
量系统资源。按照操作系统的介绍,其任务是以循环的形式存在的,因此可以将检测POC状态放入任务中单独执行,通过操
作系统进行任务调度,可以避免影响到其他任务中程序的运行,并且提高程序的执行效率。
下载后可阅读完整内容,剩余4页未读,立即下载
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传
2024-11-29 上传

weixin_38546846
- 粉丝: 5
- 资源: 920
 我的内容管理
展开
我的内容管理
展开







最新资源
- 2009NEC杯大学生电子设计全国二等奖(A题)源代码(单片机部分)
- 计算机操作系统(汤子瀛)习题答案
- sava_technology_concept_map
- 鸟哥Linux私房菜基础
- 多功能电能表的设计方案分析
- 数据结构复习重点归纳
- JAVA 基础教程全新
- how to make a S function
- 单片机设计的音乐喷泉控制器
- 华为公司的PCB设计规范
- 计算机逻辑们的高速特性,封装技术
- PC MCU 串行通信的应用设计方法
- linux控制台下显示jpeg图片
- [ASP.NET,PHP,Javascript,Ajax教程].JavaScript.2005-.Wrox.-.Professional.Javascript.For.Web.Developers
- Java设计模式(Patterns in Java)
- Warning Signs of Bogus Progress in Research in an Age of Rich Computation and Information
