球磨机PID解耦控制器应对复杂制粉系统
需积分: 24 196 浏览量
更新于2024-08-12
1
收藏 417KB PDF 举报
本文档主要探讨了2007年发表的一篇关于球磨机制粉系统的控制技术论文,标题为"球磨机制粉系统参数自整定PID解耦控制器"。作者针对球团厂钢球磨煤制粉系统的特点,如多变量、强耦合、存在时滞和非线性特性,以及工况变化频繁,指出现有的控制方法难以有效应对这些复杂性。系统控制的关键在于采用一种创新的控制策略,该策略由三个主要组件构成:比例因子模糊自整定单元、PID控制器以及基于对角矩阵法的解耦补偿器。
比例因子模糊自整定单元负责动态调整控制器的比例、积分和微分参数,以实现对系统的自我优化,减少人工干预的需求。PID控制器作为基础控制单元,通过调整这三个参数来维持系统的稳定性和响应速度。然而,传统的PID参数设置可能难以适应复杂的系统动态,因此论文提出使用粒子群优化算法来优化PID控制器的参数。这种方法通过模拟自然界中鸟群或鱼群的觅食行为,寻找全局最优解,确保控制器在各种工况下都能表现出良好的性能。
对角矩阵法的解耦补偿器则用来分解系统中的强耦合,使控制过程更加独立和精确,提高控制系统的整体性能。这种方法通过构造特定的对角化矩阵,将原本复杂的相互作用简化,使得控制策略能够更有效地处理非线性关系。
论文通过仿真结果验证了所提出的控制策略的有效性,它不仅能在大范围内解决系统的非线性和强耦合问题,还展现出良好的鲁棒性和适应不同运行工况的能力。这意味着该方法对于实际工业应用具有很高的实用价值,尤其是在对控制精度要求高的球磨机制粉系统中。
总结来说,这篇论文提供了一种创新的控制方案,通过结合模糊自整定、PID控制器优化和解耦技术,旨在解决球磨机制粉系统复杂控制问题,提升系统的稳定性和效率。这对于提升钢铁行业的制粉过程控制有着重要意义,并为其他类似工业系统的控制策略设计提供了参考。
2007
年
3
月
第
14
卷第
2
期
a
n
En
p主
FU
4
刘叫
.ri
O
RD
己
n
,
-.n
e e
--n
制咱
EU
控
im
&a··
n
O
FU
Mar.2007
Vo
l.
I4
,
No.2
文章编号:
1671-7848(2
∞
17)
02-0135-05
球磨机制粉系统参数自整定
PID
解稠控制器
王介生1,
2
王伟
1
(1.大连理工大学自动化系,辽宁大连
116023;
2.
鞍山科技大学电子信息与工程学院,辽宁鞍山
11
物
44)
摘
要:针对球团厂钢球磨煤制粉系统具有多变量强搞合、时滞、非线性以及生产工况
变化大的复杂性,已有的控制方法难以满足其控制要求的现状,以磨煤机的数学模型为依据,
提出了一种新型的多变量
PID
解祸控制策略。该控制系统由比例因子模糊自整定单元、
PID
控
制器和基于对角矩阵法的解藕补偿器组成
PID
控制器参数由粒子群算法进行优化。仿真结采
表明,所建模型和所提控制方法的有效性。该方法可在大范围内解决系统的非线性和强搞合
问题,具有较强的鲁棒性和运行工况适应性。
关键词:制粉系统;解祸
PID
控制器;粒子群优化算法;比例因子
中图分类号
TK232
文献标识码
A
Self-tuning PID Decoupling Controller of Ball Mill Pulverizing System
WANC
lie-sheng
l,
2 ,
WANC
Wei
1
(
1.
De
partment
of
Automation
,
Dalian
Univer
可
ty
of
Technol
,咽,
Dalian
1160
钮,
China;
2.
Sch
∞
1
of
Electronic
and
Inf
onnation
Engineering
,
An
shan
University
of
Science
&
Technology
,
An
shan
114044,
China)
Abstract:
To the problem that ball
rnill
coal pulverizing system of pelletizing plant is a complex nonlinear multivariable process
wi
也
strongly
coupling and time-delay,
and
也
e
automatic control is difficult to apply
to
such systerns, a new multivariable PID decoupling controller is prop-
osed
, which consists of diagonally matrix
me
也
od-based
decomposition
compensa
协
ryut
白,
PID controller and
fì
皿
zy
self-tuning
components
山白
白白
scaling
factor
a.
Particle swarm optimization algorithm is also adopted
to
op
山田
zep
缸
ameters
of PID controller. Simulation results show
the validity of the obtained model and the proposed control
method.
四
e
method can overcome nonlinear and strong coupling features of the sys-
tem in a wide range
, and has strong robustness and adaptability.
Key
words:
coal pulverized system; decoupling; PID controller; particle swarm optimization; scaling factor
1
引言
多变量强捐合、大时滞、大惯性和模型时变特
性是钢球磨煤机制粉系统实现自动控制的主要难
点
[1]
。常规控制方式是将复杂控制过程化分为几个
功能独立的单回路
PID
控制,由于没有考虑回路间
搞合,控制系统很难稳定在最佳工况,容易造成钢
球磨煤机满煤、断煤、超温及跑粉等事故发生。随
着先进控制方法和检测手段以及计算机技术的发
展,基于相对增益矩阵解搞和神经网络解藕的先进
控制方法已被提出
[2-4]
。文献
[2J
提出的基于被控
对象近似稳态增益的解藕方法,并不能有效地消除
被控对象的静态捐合。文献
[3
,
4J
均提出了基于神
经网络的解藕算法,但神经网络为调整权值进行的
学习速度慢,且在误差很大时进行学习必导致权值
过大,不利于工程实现。
本文根据磨煤机的动态特性,提出了一种简单
易实现的多变量
PID
解捐控制策略。
2
球磨机制粉系统的动态特性
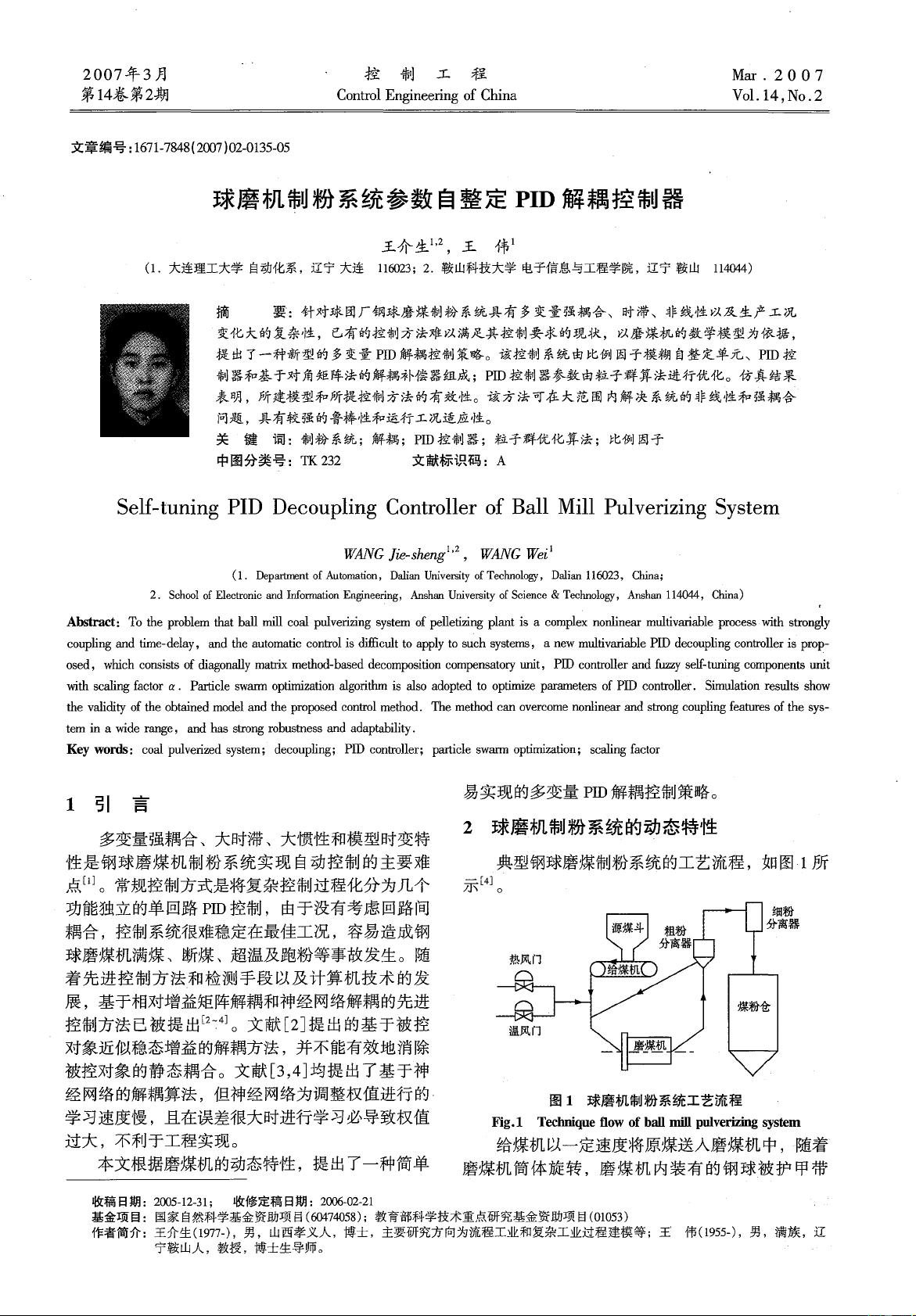
典型钢球磨煤制粉系统的工艺流程,如图
1
所
示
[4]
。
图
1
球磨机制粉系统工艺流程
Fi
g.l
Technique
flow
of
baIl mill
pulverizing
巧
rstem
给煤机以一定速度将原煤送人磨煤机中,随着
磨煤机筒体旋转,磨煤机内装有的钢球被护甲带
收稿日期
2
∞
5-12-31;
收修定稿日期
2
删
-02-21
基金项目:国家自然科学基金资助项目
(ω474058)
;教育部科学技术重点研究基金资助项目
(01053)
作者简介:王介生(1
977-)
,男,山西孝义人,博士,主要研究方向为流程工业和复杂工业过程建模等;王
伟
(1955-)
,男,满族,辽
宁鞍山人,教授,博士生导师。
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-29 上传
2021-04-24 上传
2021-10-17 上传
2021-04-24 上传
650 浏览量
2022-09-19 上传

weixin_38742954
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebDrive v16.00.4368: 简易易用的Windows风格FTP工具
- FirexKit:Python的FireX库组件
- Labview登录界面设计与主界面跳转实现指南
- ASP.NET JS引用管理器:解决重复问题
- HTML5 canvas绘图技术源代码下载
- 昆仑通态嵌入版ASD操舵仪软件应用解析
- JavaScript实现最小公倍数和最大公约数算法
- C++中实现XML操作类的方法与应用
- 设计编程工具集:材料重量快速计算指南
- Fancybox:Jquery图片轮播幻灯弹窗插件推荐
- Splunk Fitbit:全方位分析您的活动与睡眠数据
- Emoji表情编码资源及数据库查询实现
- JavaScript实现图片编辑:截取、旋转、缩放功能详解
- QNMS系统架构与应用实践
- 微软高薪面试题解析:通向世界500强的挑战
- 绿色全屏大气园林设计企业整站源码与多技术项目资源
