A*算法详解:提升无人驾驶汽车最短路径搜索效率
38 浏览量
更新于2024-08-28
1
收藏 323KB PDF 举报
在无人驾驶汽车系统的路径规划中,最短路径搜索是一个关键环节,用于确定车辆从起点到目的地的最优路线。本篇文章聚焦于A*算法,这是一种改进版的最短路径搜索算法,尤其针对Breadth-First Search (BFS) 的不足进行优化。
BFS是一种基础的搜索算法,其核心思想是从起点出发,按层次(距离)顺序遍历所有可能的节点,直到找到目标节点。在二维网格图中,BFS确保找到的是两点间的最短路径,因为它总是先探索离起点最近的节点。在BFS中,队列frontier扮演了重要角色,它存储了待访问的节点,遵循先进先出(FIFO)原则,保证了搜索的顺序性。
然而,BFS的一个主要问题是效率问题,特别是在大型地图或复杂环境中,随着搜索范围的扩大,所需时间会迅速增加。为了解决这个问题,A*算法引入了启发式函数,它利用对目标节点的估计距离(heuristic function),结合节点的实际距离(cost),形成一个总成本(f-cost),从而优先处理看起来更接近目标的节点。
A*算法的关键在于,它不是简单地扩展距离最小的节点,而是扩展f-cost最小的节点。这样,即使初始路径看起来较长,但通过启发式函数的指导,可能会发现更短的实际路径。A*算法的伪代码通常包括以下步骤:
1. 初始化:设置起点的f-cost为0,其他节点为无穷大。
2. 创建一个优先级队列,使用f-cost作为节点的优先级。
3. 将起点加入队列。
4. 当队列不为空时,重复以下步骤:
- 从队列中取出f-cost最低的节点。
- 如果该节点是目标节点,则返回路径。
- 否则,将该节点的邻居加入队列,并更新它们的f-cost。
5. 如果没有找到目标,说明可能不存在从起点到目标的路径。
A*算法的性能取决于启发式函数的准确性,如果估算的距离非常接近实际距离,算法的效率将接近于最优。在无人驾驶汽车系统中,A*算法被广泛应用,比如在路径规划中,车辆会使用实时的环境感知数据和预设的地图信息,通过A*算法快速计算出安全、高效的行驶路径。
总结来说,从BFS到A*算法的转变,是解决路径搜索问题由简单到复杂,由低效到高效的过程。在无人驾驶汽车中,这种搜索技术的优化至关重要,它决定了车辆的决策速度和整体系统的响应能力。通过理解并掌握A*算法,工程师们可以构建更加智能的自动驾驶系统。
无人驾驶汽车系统入门无人驾驶汽车系统入门——最短路径搜索之最短路径搜索之A*算法算法
最短路径搜索是通过算法找到一张图从起点(start)到终点(goal)之间的最短路径(path),为了简化,我们这里使用方格
图(该图可以简单地用二维数组来表示),如下动图所示,其中代表起点,代表终点。
广度优先算法(Breadth-First-Search, BFS)
广度优先算法实际上已经能够找到最短路径,BFS通过一种从起点开始不断扩散的方式来遍历整个图。可以证明,只要从起点
开始的扩散过程能够遍历到终点,那么起点和终点之间一定是连通的,因此他们之间至少存在一条路径,而由于BFS从中心开
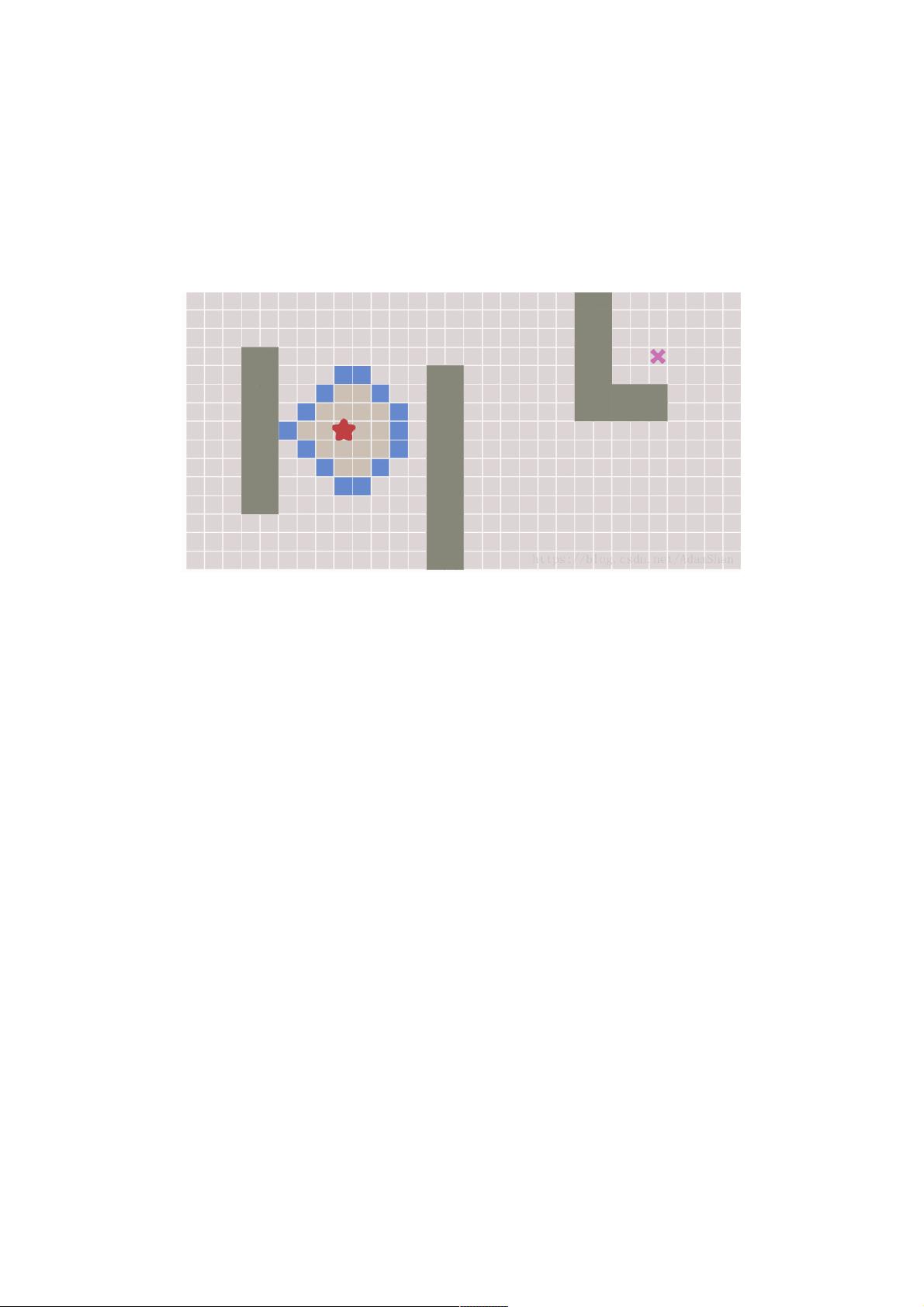
始呈放射状扩散的特点,它所找到的这一条路径就是最短路径,下图演示了BFS的扩散过程:
其中由全部蓝色方块组成的队列叫做frontier (参考下面的BFS代码)
然而,BFS搜索最短路径实在太慢了,为了提高BFS的搜索效率,接下来我们从BFS一步步改良到A*算法(其中的代码主要用
于表达思路,距离实际运行还缺部分support code)
BFS代码:
所涉及到的主要数据结构:
graph,要找到一张图中两点之间的path,我们需要一个最基本的graph数据结构。在本文中,我们只需要得到某一点的邻近
点,在这里我们的代码调用graph.neighbors(current),该函数返回点current周围的所有邻近点构成的一个列表,由for循环可
以遍历这个列表。
queue 为了解释用队列的原因,请看下图,假设此时frontier为空,current当前是A点,它的neighbors将返回B、C、D、E四
个点,在将这4个点都添加到frontier当中以后,下一轮while循环,frontier.get()将返回B点(根据FIFO原则,B点最早入队,应
当最早出队),此时调用neighbors,返回A、f、g、h四个点,除了A点,其他3个点又被添加到frontier当中去。再到下一轮循
环,此时frontier当中有C、D、f、g、h这几个点,由于队列的FIFO原则,frontier.get()将返回C点。这样就保证了整个扩散过
程是由近到远,由内而外的,这也是广度优先搜索的原则。可以看到,frontier.get()从队列中取出一个元素(该元素将从队列
中被删除)。而frontier.put()将current的邻近点又添加进去,整个过程不断重复,直到图中的所有点都被遍历一遍。
visited列表:接着上面的讨论,graph.neighbors(A)将返回B、C、D、E 4个点,随后这4个点被添加到frontier当中,下一轮
graph.neighbors(B)将返回A、h、f、g四个点,而加入此时A再被添加到frontier当中就导致遍历陷入死循环,为了避免这种状
况出现,我们需要将已经遍历过了的点添加到visited列表当中,之后在将点放入frontier之前,首先判断该点是否已经在visited
列表当中。
下载后可阅读完整内容,剩余3页未读,立即下载
2022-01-03 上传
2018-04-30 上传
2022-05-30 上传
2023-10-27 上传
2009-02-05 上传
2015-02-22 上传
2022-09-23 上传
2021-11-07 上传
2020-01-19 上传

weixin_38715879
- 粉丝: 4
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
