ABB工业机器人编程:第四章——掌握I/O通讯与标准板卡详解
版权申诉
第四章详细介绍了ABB工业机器人的通讯系统,这是编程中的关键环节。本章首先阐述了I/O(输入输出)的概念及其在机器人与外部设备交互中的作用,包括数字量输入(如开关、传感器信号)和数字量输出(控制继电器、指示灯等)。ABB机器人的标准I/O板采用PNP类型,强调了学习信号配置、监控和操作的方法。
本章进一步深入探讨了不同类型的通讯接口,如ABB的标准通讯、与PLC(可编程逻辑控制器)的现场总线通讯,以及与PC(个人计算机)的数据交换,这有助于实现与周围设备的无缝连接。其中,以DSQC651和Profibus-DP作为例子,详细讲解了如何进行参数配置,使得机器人能与这些设备高效协作。
标准I/O板的硬件配置也得到了关注,比如主计算机单元和ABB标准I/O板的安装位置,包括电源接口、服务端口、多个网络接口,以及可选的RS232串口、工业通讯总线接口(如DeviceNet、Profibus、Profinet和EtherNet IP)。特别提到了DSQC651板,它拥有8个数字输入、8个数字输出和2个模拟输出接口,每个接口的功能和连接方式都有明确的说明。
此外,章节还提及了ABB机器人可以选择内置的PLC,简化了与外部设备的通信过程,使得在示教器上就能完成相关操作。这对于理解机器人控制系统和优化生产流程具有重要意义。
第四章为工业机器人编程者提供了关于I/O通讯、接口配置、硬件布局以及实际操作步骤的全面指导,是理解和掌握ABB机器人通讯技术的基础。
© ABB
| Slide 16
December 30, 2022
4.2. ABB标准IO板卡介绍
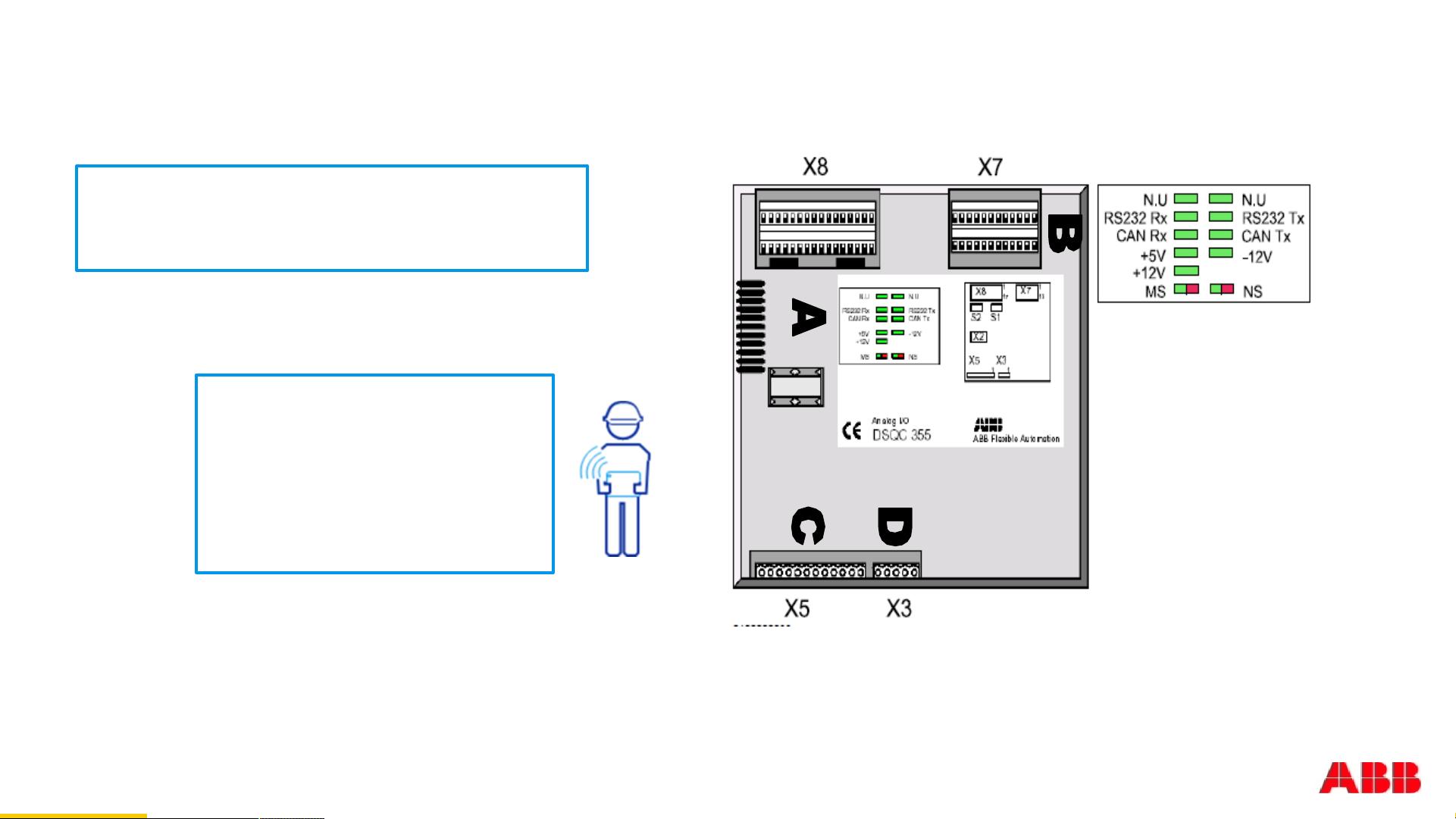
4.2.4 ABB标准I/O板 DSQC355A
DSQC355A板主要提供4个模拟输入信号和4个
模拟输出信号的处理
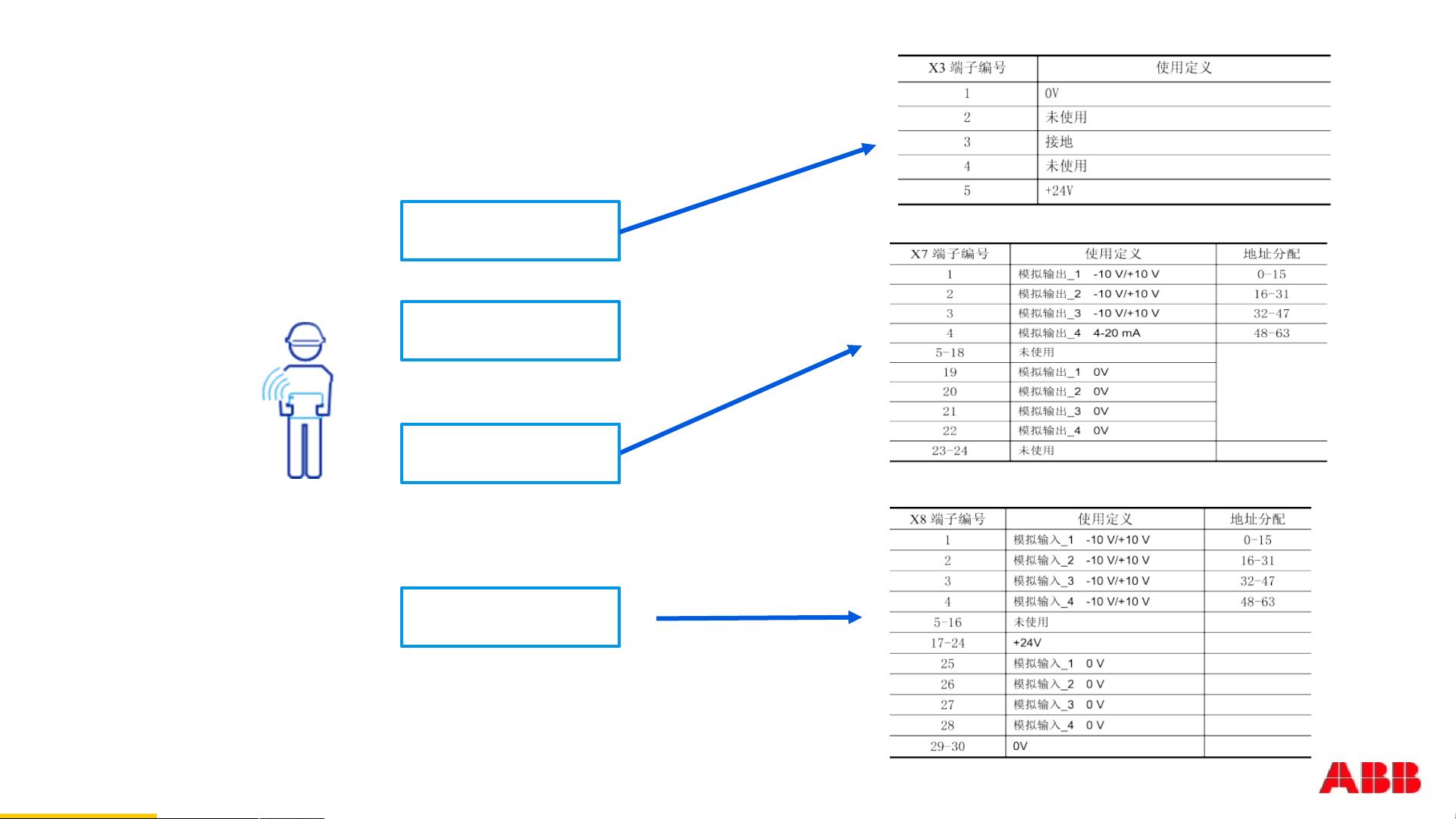
A X8模拟输入端口。
B X7模拟输出端口。
C X5是DeviceNet接口。
D X3是供电电源。
a.
模
块
接
口
说
明

剩余157页未读,继续阅读
147 浏览量
144 浏览量
2022-11-15 上传
258 浏览量
2024-11-07 上传
439 浏览量
409 浏览量
2024-11-09 上传
310 浏览量

是空空呀
- 粉丝: 199
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 打字稿恐龙游戏
- dotnet-unpkg:使用unpkg.com作为源的纯.NET前端HTML软件包管理
- Day10
- 入门R编程和机器学习
- Perl克鲁里亚
- scroll-manager:[未维护]
- Fuzzy Mark-crx插件
- 语音回声消除使用到的算法
- 个人毕业设计 - 基于树莓派、OpenCV及Python语言的人脸识别.zip
- testWorkshop:测试WebApp
- Pomodoro Timer-crx插件
- PruebaActividad2
- ShawnOS:基本的x86操作系统内核
- Table.m:Matlab中DataTable的实验性实现
- 易语言易用键盘鼠标大师
- 拍卖源码java-nexmark:连续数据流查询的基准
