FANUC机器人文件备份与加载:详细步骤与区别
版权申诉
115 浏览量
更新于2024-09-08
1
收藏 4.16MB DOCX 举报
"这篇文档详细介绍了在FANUC机器人的一般模式下如何进行文件的备份与加载,包括适用的设备、文件类型、不同模式下的备份加载区别,以及具体的操作步骤。主要内容涉及MemoryCard和USB作为备份/加载设备的使用,R-30iB控制柜的特性,以及各种类型的文件,如程序文件、逻辑文件、系统文件、I/O配置文件和数据文件。此外,还提到了镜像备份的方法,包括一般模式、控制启动模式和BootMonitor模式。"
在FANUC机器人的操作中,文件备份和加载是维护和恢复系统的重要环节。R-30iB控制柜支持MemoryCard和USB设备进行此操作,但要注意R-30iBMate控制柜不支持CF存储卡。备份的文件类型多样,包括程序文件(*TP)用于存储用户程序,逻辑文件(*DF)为默认逻辑,系统文件(*SV)保存系统设置,I/O配置文件(*.I/O)记录输入输出配置,数据文件(*VR)则保存寄存器等数据。
备份与加载有其特定的应用场景,例如在一般模式和控制启动模式下执行。镜像备份是一种全面的备份方式,包括系统设置和数据,R-30iA和R-30iB控制柜支持这种功能,但在BootMonitor模式下也有相应的备份/加载方法。
在一般模式下进行备份或加载,首先需要通过MENU菜单选择File,然后进入UTIL工具选项。选择所需的备份/加载设备,如MemoryCard,然后进行格式化。格式化后,可以创建文件夹,接着进入文件夹并选择“backup”来备份特定类型的文件,如程序文件。用户可以根据需要选择备份全部文件或特定文件类型。
加载过程类似,只需在相应文件夹内选择“load”加载已备份的文件。整个过程中,确保正确操作,以免误删或覆盖重要数据。对于更复杂的备份需求,如镜像备份,需按照控制柜提供的特定步骤和指南进行,这通常涉及到控制柜的特殊启动模式。
理解并掌握FANUC机器人的一般模式下文件备份与加载的详细步骤对于系统的维护和故障恢复至关重要,这能确保机器人系统的稳定运行,并在出现问题时能够迅速恢复到正常状态。
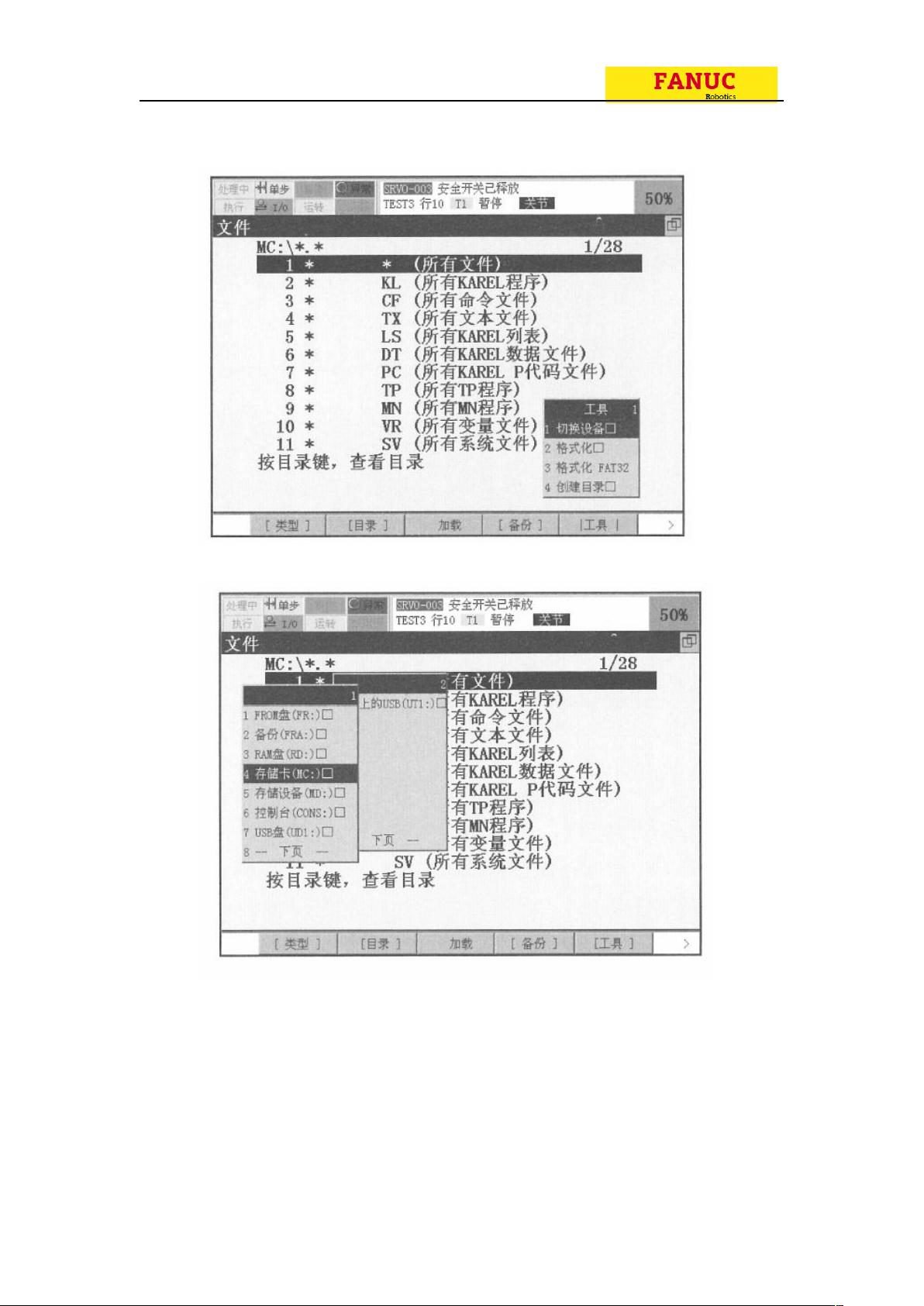
1) 按 MENU 菜单键—选择 File—UTIL(工具),显示如下画面,
2) 移动光标选择“切换设备”,按 enter 回车确认,显示如下画面,
3) 选择存储设备类型,如存储卡 MC,按 enter 回车确认,进入如下画面,
剩余10页未读,继续阅读
2019-10-10 上传
2023-05-31 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传
2023-06-10 上传
2023-05-31 上传

AAA_自动化工程师
- 粉丝: 6727
- 资源: 3402
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
