




环形倒立摆控制研究:Matlab_Simulink建模与鲁棒控制
版权申诉
"这篇毕业论文主要探讨了基于Matlab_Simulink的环形倒立摆的建模与控制方法,研究了不同控制策略在倒立摆系统中的应用,并进行了实验验证。"
倒立摆系统是控制系统理论中的一个重要研究对象,因其欠驱动、非线性、强耦合和自然不稳定的特点,对于控制算法的实时性和有效性提出了高要求。这种系统的特性与许多实际工业中的非线性系统相吻合,因此对其研究有助于评估和优化控制算法,并具有显著的工程实践价值。
本文首先通过拉格朗日方程构建了一级和二级环形倒立摆的数学模型,这是建模的传统方法,但通常需要对模型进行理想化处理和线性化,可能会影响模型的精度。为解决这一问题,论文提出了一种新的建模方式,即结合三维软件(如SolidWorks)与SimMechanics进行联合建模,这种方法可以实现更直观的可视化和3D动态模拟,提高了建模的准确性和效率。
在控制策略方面,论文设计了多种控制器,包括PID控制器、极点配置法、LQR控制器以及模糊控制和基于能量的起摆控制。这些控制器通过Matlab/Simulink进行了仿真验证,分析了它们在稳定倒立摆和起摆过程中的性能特点。此外,论文还引入了一种鲁棒控制方法,无需对模型进行线性化处理,直接设计控制器,仿真结果表明该控制器具有快速响应和良好的鲁棒性。
实验部分,论文利用Matlab的GUI功能创建了友好的人机交互界面,将仿真模型应用于环形倒立摆实验平台,通过实际操作进一步验证了各控制器的性能。实验和仿真的对比分析揭示了各种控制策略在不同场景下的适应性和效果。
这篇论文深入研究了倒立摆控制的多种方法,提出了新的建模和控制技术,对提升控制系统的性能和效率有重要意义。关键词涵盖了环形倒立摆、鲁棒控制、可视化建模、仿真和实验等核心概念,体现了研究的广度和深度。
第二章 环形倒立摆系统动力学建模
9
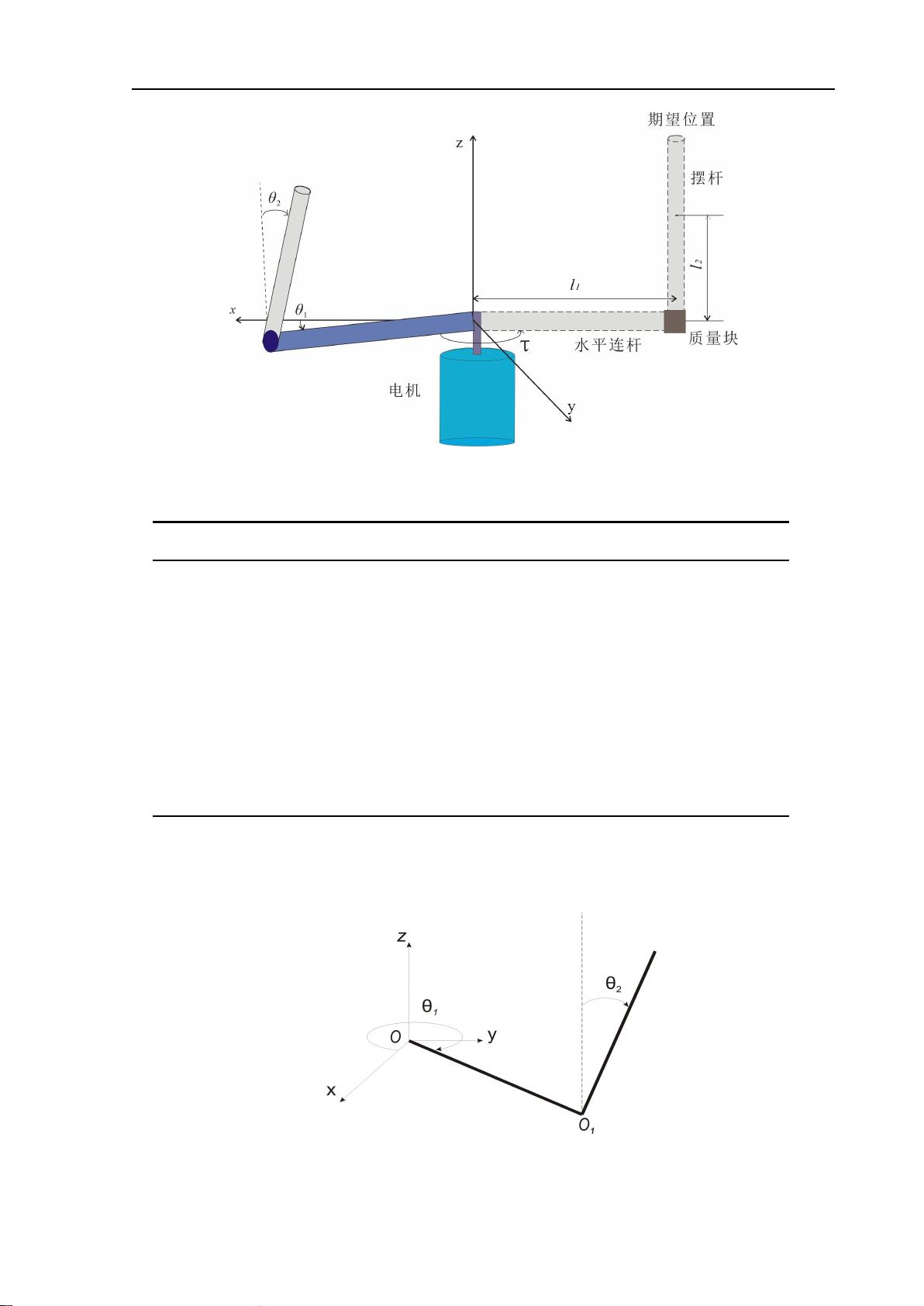
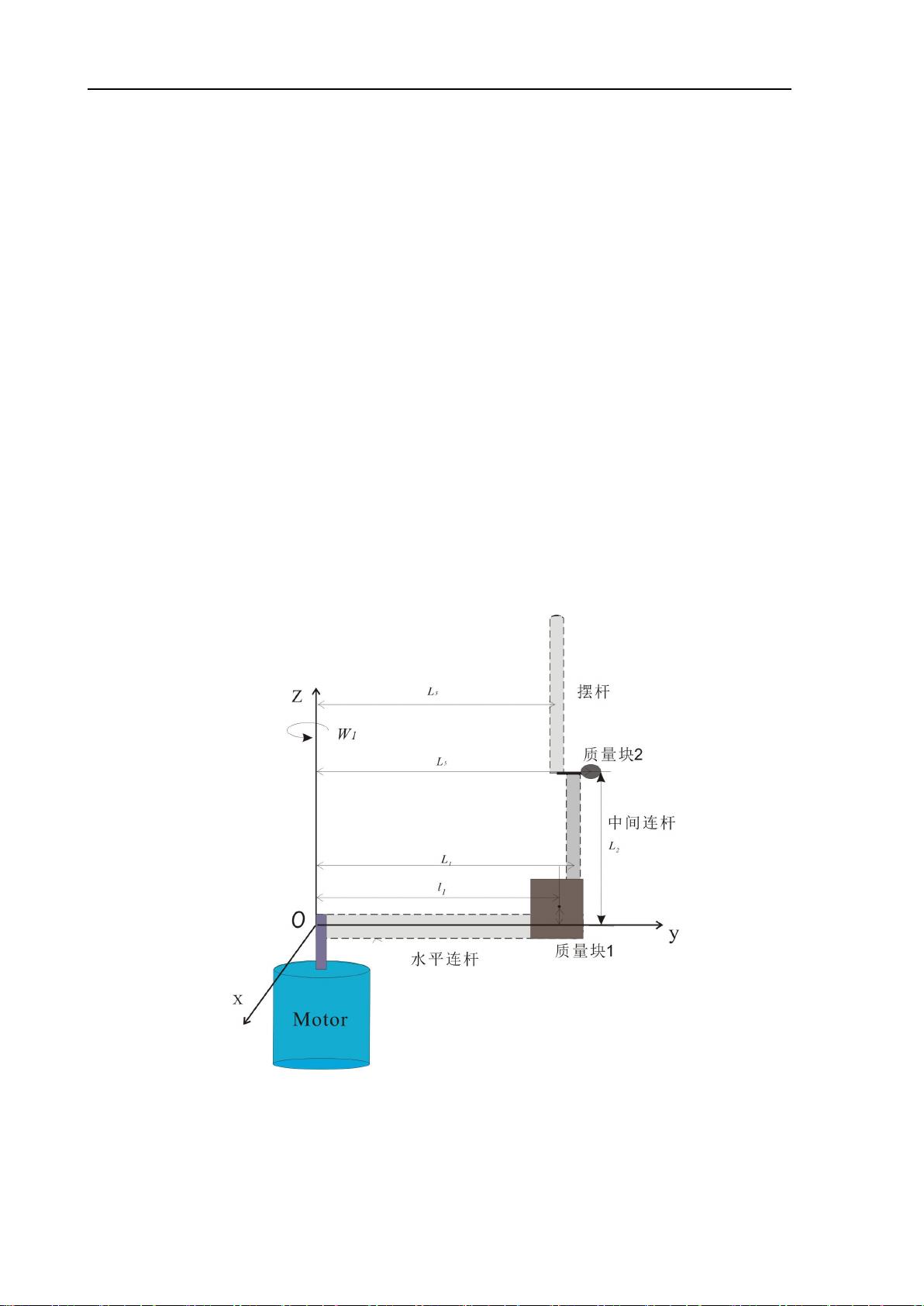
图 2.1 环形一级倒立摆模型图
表 2.1 一级环形倒立摆的物理参量
参数
物理意义
数值
1
连杆与水平
x
轴的夹角(顺时针为正)
2
摆杆与垂直向上方向的夹角(顺时针为正)
1
l
水平连杆长度
0.334m
2
l
摆杆转动中心到杆质心的距离
0.2496m
1
m
连杆质量
0.437kg
2
m
摆杆质量
0.134kg
3
m
质量块质量
0.183kg
2.2.2 数学建模
现根据实验室环形倒立摆系统,对倒立摆系统建立如图 2.2 所示的分析图。
图 2.2 环形一级倒立摆分析图

剩余75页未读,继续阅读
相关推荐
482 浏览量
223 浏览量
121 浏览量
365 浏览量
316 浏览量
1132 浏览量
104 浏览量
2024-10-30 上传
107 浏览量
123 浏览量


xox_761617
- 粉丝: 31
 我的内容管理
展开
我的内容管理
展开








最新资源
- PostgreSQL 9.0 JDBC3驱动压缩包解析
- 网络时间同步程序:C#实现电脑时间精准校准
- BC3.1压缩包:C语言新手必备编程工具
- HTML5实现手机触屏滑动图片特效指南
- BDSx脚本加载器:基岩服务器的扩展解决方案
- 基于Oracle和Tomcat的Osworkflow请假系统DEMO
- 2021年Firebase火力基地项目开发实战
- C++实现反向传播神经网络及其保存功能
- 实现网页滑动门效果的DOM技术解析
- HTML5 Canvas与jQuery Jcrop实现照片剪切功能
- 软件测试基础:流程、方法与工具全面解析
- 下载分享:祈福主题ASP网站后台源码解析
- KOKO网格生成器:MATLAB实现二维有限元网格生成
- Linux中文输入法软件:高效中文输入解决方案
- 超市收银系统VB前端开发源码
- 精选jQuery文字图片滚动代码下载










