KUKA机器人系统与用户编程详解
版权申诉
8 浏览量
更新于2024-07-05
收藏 4.19MB PPT 举报
"这份PPT详细介绍了KUKA机器人的基础知识,涵盖了机器人在不同领域的应用、机器人本体、驱动方案以及用户编程等多个方面。"
KUKA机器人是全球知名的工业机器人制造商,其产品广泛应用于各个行业的自动化生产线,包括但不限于焊接。在描述中提到的焊接应用中,KUKA机器人可以执行点焊、MIG焊、TOX焊、螺柱焊以及激光焊等多种任务,展示了其在精密作业和高效生产中的卓越性能。
在系统概述部分,1.1章节详细讨论了KUKA机器人的本体结构和驱动方案。机器人本体是机器人硬件的核心,包括机械臂和关节,这些部分的设计决定了机器人的工作范围和精度。而驱动方案则涉及了如奔腾处理器、KUKA-VGA卡、MFC卡、DSE卡以及旋转变压器数字转换器(RDW)等关键组件。这些硬件设备共同协作,确保机器人能够精确、快速地执行指令。
KUKA-VGA卡负责显示功能,MFC卡提供多功能支持,DSE卡是数字式伺服电子电路,用于控制电机运动。旋转变压器数字转换器(RDW)是反馈系统的一部分,用于检测和校正机器人关节的位置。KUKA控制屏(KCP)作为人机交互的界面,集成了键盘、空间鼠标和以太网接口,使得操作员能够方便地监控和控制机器人。
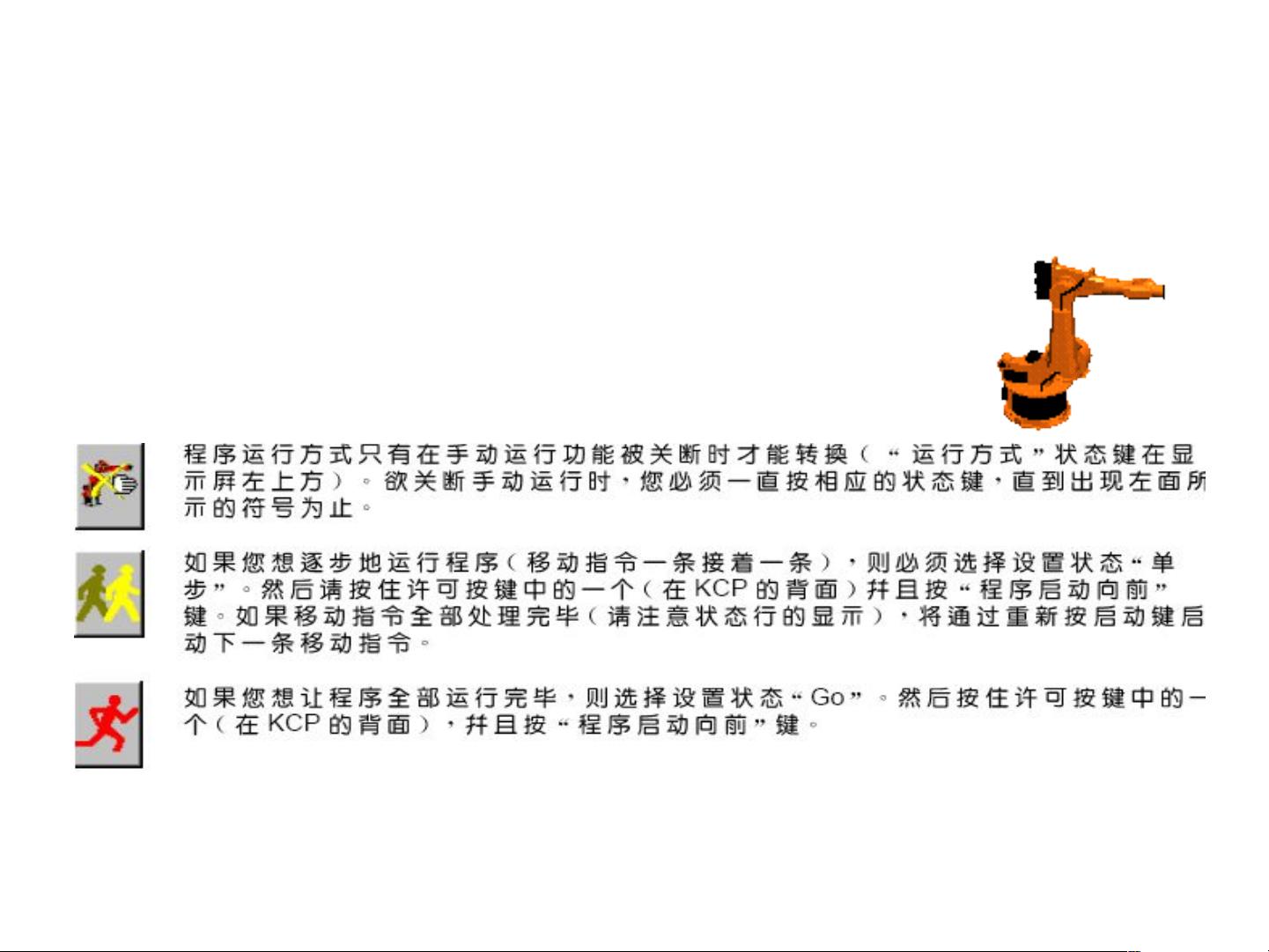
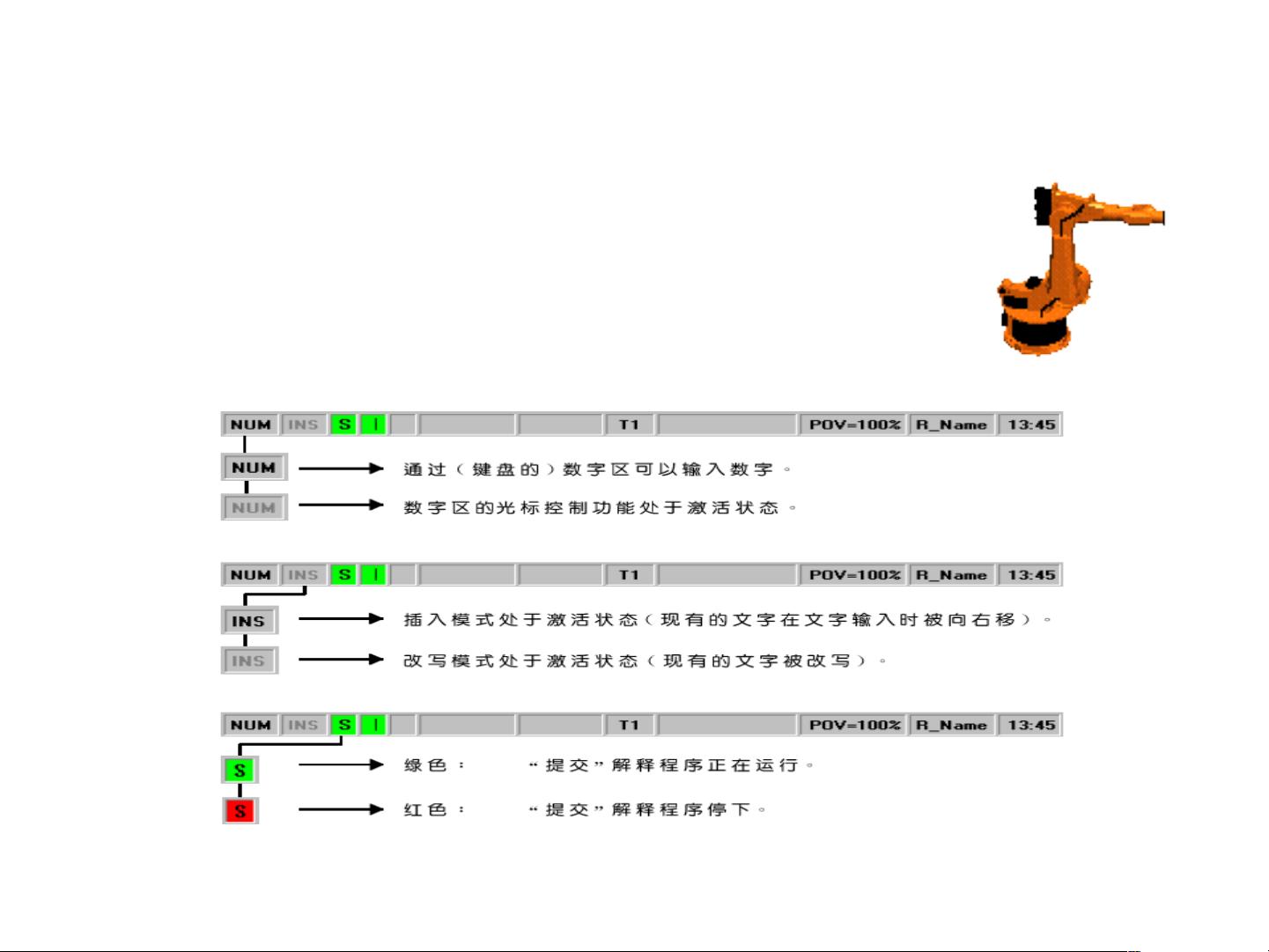
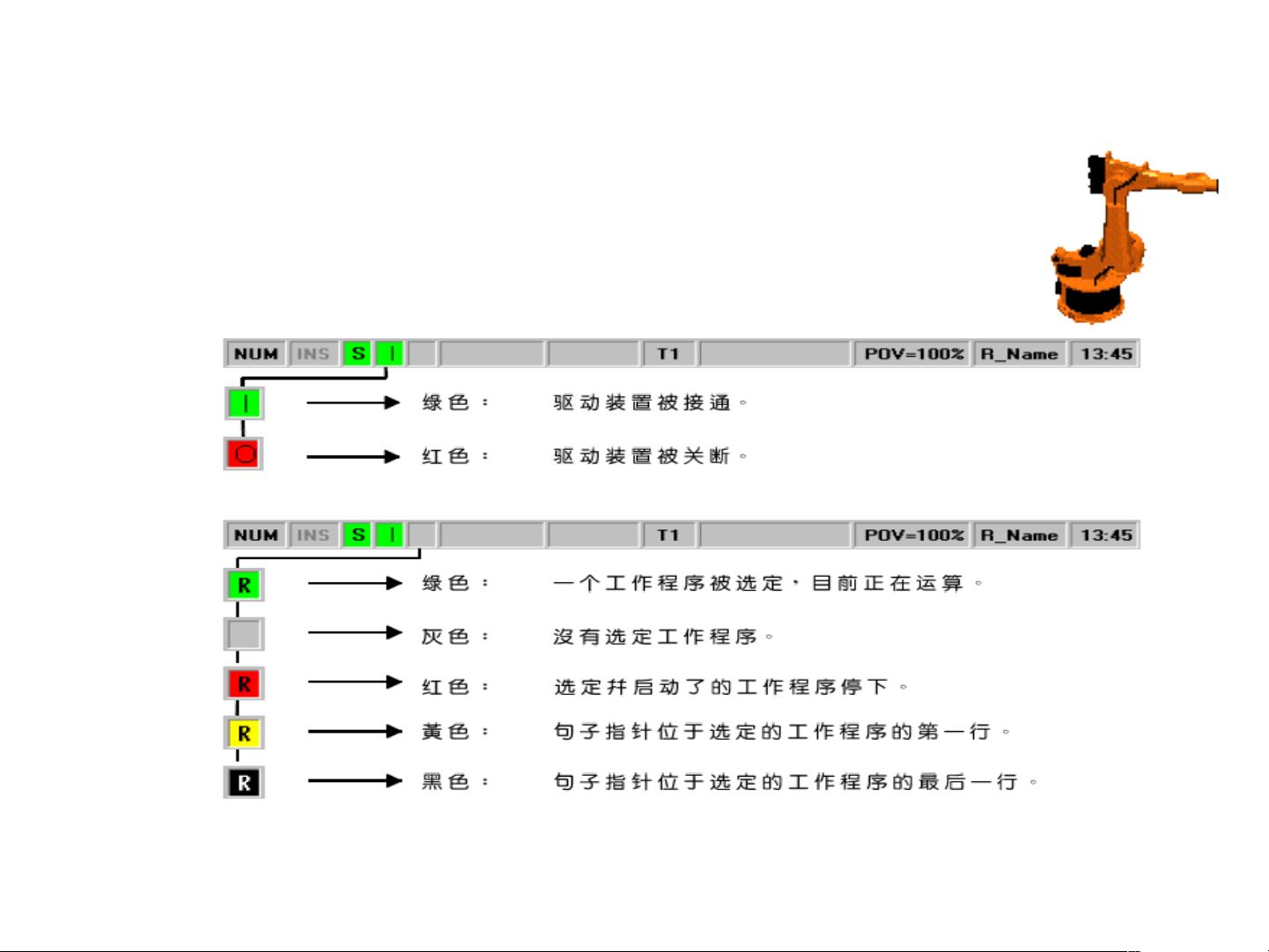
在用户编程方面,2.1章节主要介绍了KUKA机器人的操作屏及其功能。状态键和程序运行方式(单步或GO)是操作屏的基本元素,帮助用户实时了解机器人状态并控制程序执行。状态条提供了关于机器人当前运行模式和错误信息的反馈。此外,还提到了坐标系的概念,这是编程时定位和移动机器人的重要参考。
2.2章节涉及了程序的建立,用户可以创建FOLGE、UP和MACRO等不同类型的程序。例如,主程序可能包含PTP(点到点)运动指令,如PTPVB=30%VE=0%ACC=100%Wzg=1SPSTrig=0[1/100s]FP,这表示机器人将以30%的最大速度、0%的加速度、100%的减速距离和1毫秒的脉冲时间进行点到点运动,并在到达目标点后打开末端执行器。
这份资料详细解析了KUKA机器人系统的各个方面,对于理解和操作KUKA机器人具有极高的指导价值。无论是初次接触还是深入学习,都能从中获取丰富的知识。
995 浏览量
2021-10-01 上传
2024-05-30 上传
2021-10-02 上传
2021-10-02 上传
2021-10-02 上传
2021-10-07 上传
2022-01-23 上传

猫一样的女子245
- 粉丝: 231
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 埃森哲如何帮助沃尔玛成就卓越绩效
- ElectricRCAircraftGuy/MATLAB-Arduino_PPM_Reader_GUI:使用 Arduino 从 RC Tx 中的 PPM 信号中读取操纵杆和开关位置,并绘制和记录-matlab开发
- C#写的IOC反转控制源代码例子
- 供应商质量体系监察表
- Hedgewars: Continental supplies:centinental 供应的“主要”开发页面-开源
- 元迁移学习的小样本学习(Meta-transfer Learning for Few-shot Learning).zip
- .NET Core手写ORM框架专题-代码+脚本
- 《物流管理》第三章 物流系统
- Python_Basic:关于python的基本知识
- 王者荣耀段位等级图标PNG
- 使用 PVsystem 升压转换器的逆变器设计.mdl:带有使用 PV 的升压转换器的简单逆变器模型-matlab开发
- touchpad_synaptics_19.0.24.5_w1064.7z
- Analise播放列表做Spotify --- Relatorio-Final
- 开放式旅行商问题 - 遗传算法:使用 GA 为 TSP 的“开放式”变体找到近乎最优的解决方案-matlab开发
- fr.eni.frontend:培训前端
- kracs:克拉斯
