MATLAB-Simulink联合仿真教程:AMESim接口与控制
本资料是关于MATLAB与AMESim联合仿真的教程,涵盖了从MATLAB控制AMESim、状态空间矩阵的导入、AMESim模型到Simulink的S-函数转换以及AMESim和Simulink之间的共仿真等多个方面。教程由法国伊梦镜公司上海代表处提供,适用于对MATLAB和AMESim接口有需求的工程师和学习者。
在MATLAB与AMESim的联合仿真中,用户可以利用预定义的M文件从MATLAB环境中直接控制AMESim的运行。这包括将状态空间矩阵输入到AMESim中进行动态系统建模。通过这种方式,用户可以利用MATLAB强大的数学计算能力处理复杂的系统方程,同时结合AMESim的流体动力学和机械系统的仿真能力。
AMESim模型可以通过S-函数转换到Simulink环境中,这样可以在Simulink的工作台中直接利用AMESim的模型进行系统级的联合仿真。这种S-函数接口使得AMESim模型能够与Simulink的其他组件无缝集成,扩展了仿真系统的复杂性和多样性。
此外,AMESim与Simulink的共仿真功能允许两个工具之间进行实时数据交换。在共仿真过程中,AMESim作为一个独立的仿真引擎运行,而Simulink作为控制器或数据处理部分,两者通过特定的通信协议协同工作。例如,一个AMESim模型可以模拟泵的工作,而Simulink则负责处理泵速度的控制逻辑。
通过这个接口,用户可以在MATLAB中获取AMESim的仿真结果,进行高级的数据分析和后处理。还可以交换传递函数,即雅可比矩阵,以分析系统动态特性。更进一步,MATLAB可以直接访问AMESim的模型参数,允许在MATLAB环境中调整模型参数,甚至改变仿真运行参数。这意味着用户可以在MATLAB中定义整个仿真流程,包括批处理运行和优化方案,而不仅仅是简单的模型修改。
MATLAB与AMESim的联合仿真提供了强大的系统设计和分析能力,结合了两者的优势,使得工程师能够处理多物理场的复杂问题,并在统一的开发环境中实现建模、仿真和优化。这对于车辆、航空、能源等领域的流体动力学系统设计尤为有用。
7
©IMAGINE SA 1998-2006
Training
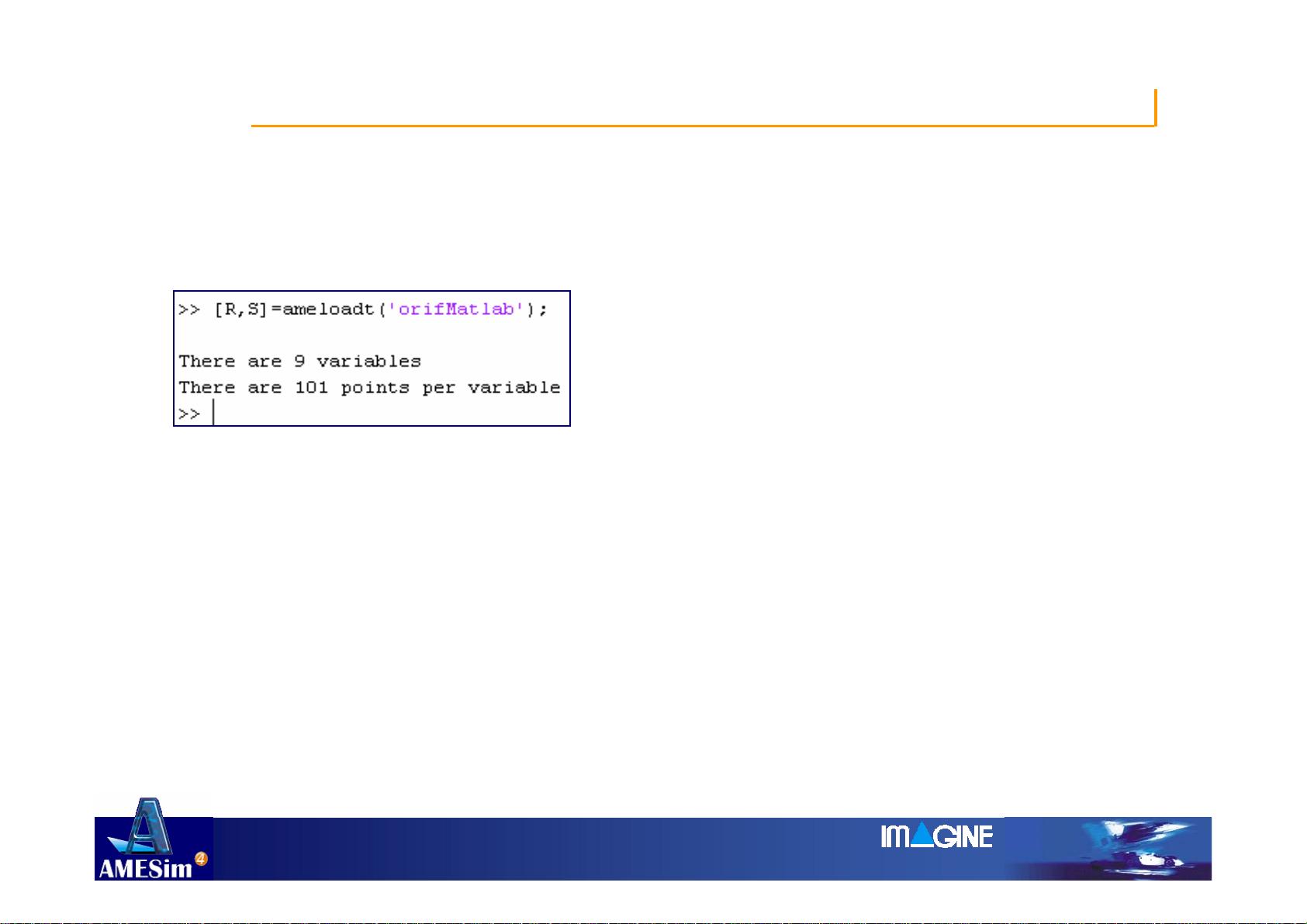
¾从Matlab
®
中输入AMESim仿真结果:
返回模型中变量的数量以及每个变量记录的数据点数:
Time simulation(10)/Communication interval(0.1)+1
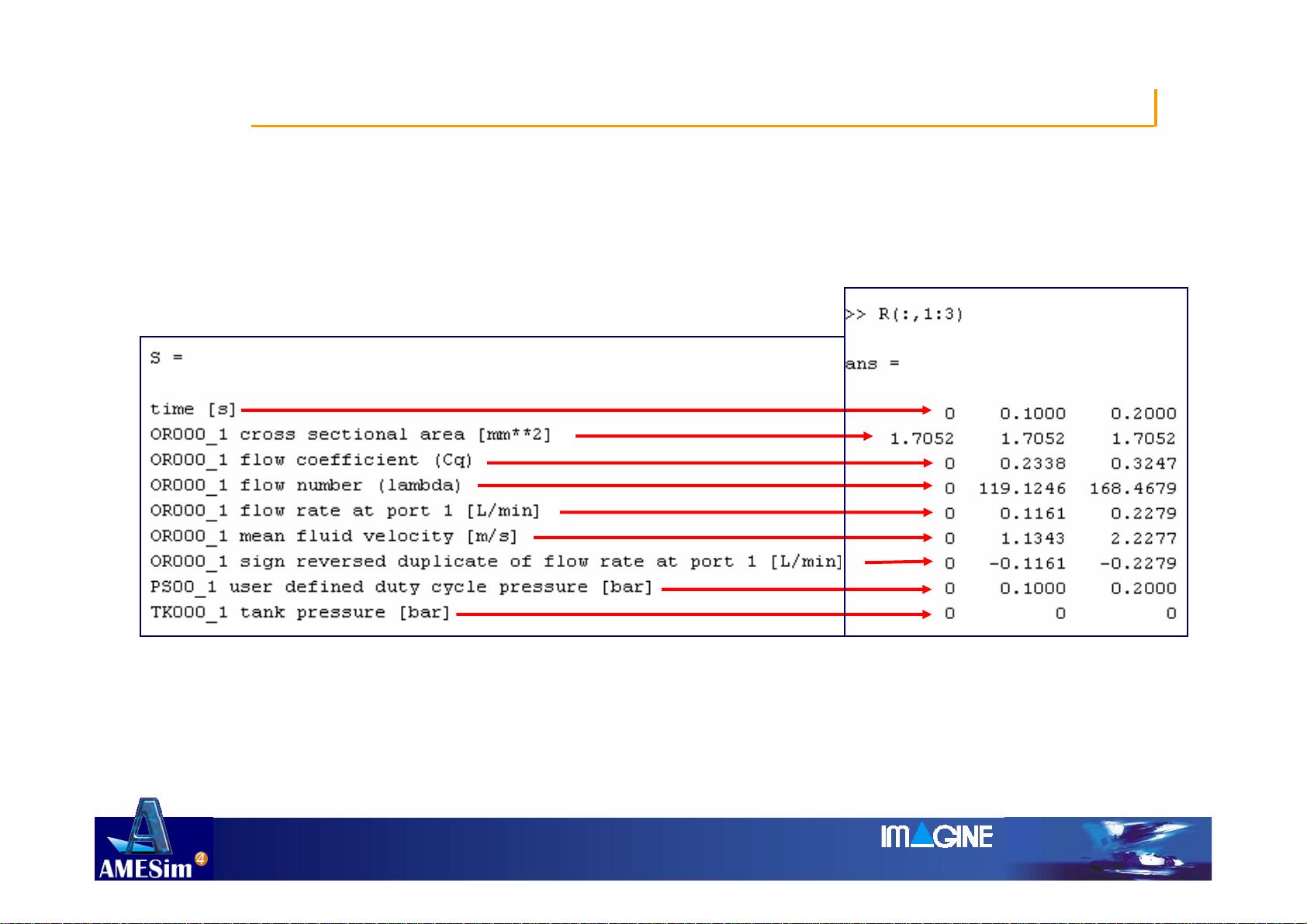
9S 矢量, 存放变量的名字
9R 矩阵, 存放每个变量的仿真结果
Matlab
®
↔
AMESim
®
剩余36页未读,继续阅读
相关推荐





Arthur840
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cocos2d-x 3.2游戏开发教程:实现积分卡体力恢复功能
- 新型隔震支座施工方法及其装置的设计应用
- 快速搭建RESTful API服务:使用Fastify框架
- 双端在线考试系统设计与实现
- Linux环境Zookeeper集群配置与管理实战教程
- GNU glibc-libidn-2.5压缩包解析
- Chrome浏览器实时刷新神器:liveReload插件
- 小米USB驱动程序安装与更新指南
- JetCache:简化Java缓存操作的封装系统
- 建筑裂缝处理新施工方法的详细介绍
- 官方映美FP501K打印机驱动下载指南
- VHDL实现的液晶显示多功能数字钟设计与说明
- 天猫前端模拟实现与八页面实战演示
- 建筑物应急逃生系统创新设计及应用
- glibc-linuxthreads 2.2.2版本GNU压缩包解析
- Linux环境下的haproxy-1.4.8模拟F5负载均衡软件
