弹性系列高保真力控执行器:工业机器人关键技术
版权申诉
180 浏览量
更新于2024-06-23
收藏 1.31MB DOC 举报
本文档聚焦于MCB工业机器人的专题研究,主要讨论了弹性系列高保真力控制执行器在复杂环境下的优势。关键词涉及机器人、力控制、触觉、外骨骼和足机器人,强调了在不受约束的环境中,这些执行器对于提高机器人的力量感知、灵活性和精确性的重要性。
首先,弹性执行器系列的优势在于其高力保真度,这意味着它们能准确模拟和传递力,确保机器人在进行精细操作时如足机器人在崎岖地形行走时具有稳定的抓地力。它们的低阻抗特性降低了驱动过程中额外力量的消耗,提高了能量效率,使得机器人在动态环境中表现更佳。此外,通过采用创新的机械设计,如齿轮传动和减小刚度的结构,这些执行器能够实现对负载的精细控制,同时保证位置传感器测量的精度。
文章还提到,为了精确计算执行器的挠度变形和力输出,通常会利用胡克定律,这是一个基础的物理学原理,用于描述外力与形变之间的关系。控制循环和伺服驱动器的设计必须考虑到这些因素,以确保在冲击、力量变化和不同频率下都能保持稳定性能。
在实际应用中,理想的力量控制执行器应该能够提供完全独立于负载运动的力输出,但现实中所有执行器都存在局限,如阻抗、表面阻力和带宽。阻抗与负载运动的频率有关,低阻抗意味着系统响应更快,而表面阻力则会影响执行器在滑动接触中的性能。带宽则决定了力控制系统的动态范围,宽广的带宽意味着更强的控制能力。
文章最后指出,当前的执行器技术,如齿轮电机和液压系统,虽然在某些方面表现出色,但都未能达到理想的力控制性能。肌肉的性质——低阻抗、无粘附和适中的带宽——被看作是接近完美力量来源的理想模型,但实际应用中仍需克服技术上的挑战。
总结来说,该文档深入探讨了如何通过改进机械设计和优化执行器性能,提升工业机器人的力控制能力,使之在各种复杂应用场景下发挥更大的效能,特别是在足机器人、外骨骼和触觉接口等领域。
这是更为宽容的碰撞和其他意想不到的相互作用。
Yobotics 公司已开发了两个市售电磁线性系列(图 2)弹性执行器。这些驱动器正在应
用于机器人手臂、腿机器人、外骨骼和工业中。由于设计简单,定制系列弹性执行器也可以
很容易地开发和遗留系统改造。
图 2:两个弹性执行器系列 CAD 渲染。
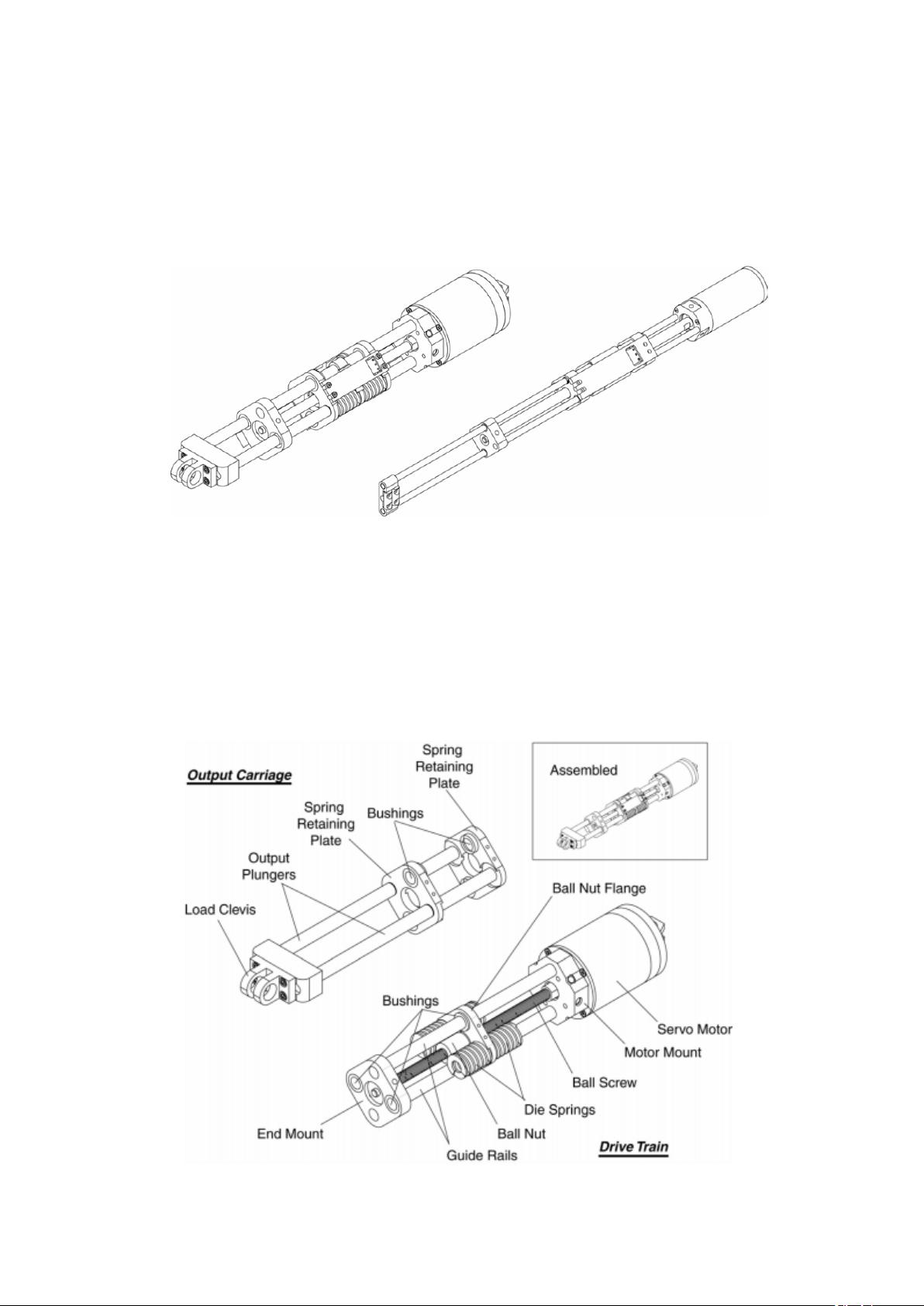
从宏观层面上看,驱动器可以被认为由两个组件组成:一个驱动器列车车厢和一个输出组件
刀片组。输出马车刀片组爆炸视图(除了传动组件)如图 3 所示。组装时,输出托架组件、
刚性结构以及耦合传动系统通过模具压缩弹簧组件。弹簧固定器板(三明治)由模具弹簧和
球螺母法兰组成。导轨通过衬套在球螺母法兰上,迫使球坚果在滚珠螺杆旋转是沿直线运动。
导轨还通过保留在钢板上的弹簧衬套迫使整个输出马车组件遵循沿滚珠螺母的直线运动。
剩余19页未读,继续阅读
2022-09-21 上传
2023-10-24 上传
2009-06-04 上传
2022-05-06 上传
2022-09-23 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
