Harris角点检测算法详解
"本文档详细介绍了Harris角点检测算法,这是一种用于图像处理的特征检测方法,旨在识别图像中的角点。Harris角点检测是对Moravec算子的改进,通过高斯函数降低噪声影响,并使用Taylor展开处理任意方向的变化。算法通过计算相关矩阵M的特征值来判断像素点是否为角点,对灰度平移和旋转具有不变性,但对尺度变化敏感。Harris算子因其计算简单、提取特征点均匀合理以及稳定性强而被广泛应用。"
Harris角点检测算法是计算机视觉领域中一种经典的图像特征检测技术,由Harris等人在1988年提出。这个算法的核心是通过分析图像局部区域的结构变化来检测角点。角点是图像中重要的局部特征,它们在图像变换(如平移、旋转、缩放)后依然保持稳定,因此在许多应用中,如目标识别、图像配准和3D重建等,角点检测具有重要意义。
Harris算法改进了Moravec算子,Moravec算子主要基于相邻像素的梯度方向差异来检测角点,而Harris算法则采用了更平滑的处理方式,使用高斯函数作为权重函数,降低了噪声的影响。这使得在计算局部特性时,离中心像素越近的像素权重越大,从而更好地抑制噪声。
Harris算子使用的是Taylor展开来近似任意方向的变化,而不是像Moravec算子那样仅考虑45度方向。通过计算二维导数Ix和Iy,构建一个2x2的相关矩阵M,该矩阵的元素包括差分的平方和差分的乘积。高斯函数w(x, y)在此过程中作为权重应用于矩阵M的元素上。
矩阵M的特征向量l1和l2分别对应于图像局部结构变化的最快和最慢方向。Harris算法利用这两个特征向量来判断点是否为角点:如果l1和l2都较大,说明该点是角点;如果一个大一个小,则可能是边缘;如果两者都很小,表示该点位于图像变化不明显的区域。通过计算矩阵M的迹(两个特征值之和)和行列式(两个特征值的乘积),可以得到一个角点响应指标,通常用R表示。当R大于某个阈值时,我们认为该点是角点。
Harris算法的基本步骤包括:
1. 对图像的每个像素点计算相关矩阵M。
2. 计算每个像素点的Harris角点响应R。
3. 在一个预设的邻域内找到R的最大值,如果超过设定的阈值,则认为该点是角点。
然而,Harris算法对尺度变化敏感,即在同一图像的不同缩放比例下,同一角点可能会被误判。此外,虽然对灰度平移和旋转具有不变性,但在噪声较大的场景下,稳定性可能会受到影响。
Harris算子的优势在于其计算效率和特征点的合理分布。由于只涉及一阶导数,算法计算简单,对图像旋转、灰度变化和视点变换有较好的鲁棒性。同时,它能够在纹理丰富的区域提取大量特征点,而在纹理稀疏的区域则提取较少的特征,确保了特征点的均匀分布。
Harris角点检测算法是一种高效、稳定的特征检测方法,尽管对尺度变化敏感,但在很多实际应用中仍然表现出色。通过理解其工作原理和优化策略,我们可以更好地利用这种算法进行图像处理和分析任务。
1.3 Harris 角点检测算子
Harris[2]角点检测算子是 Moravec 角点检测算子的改进.
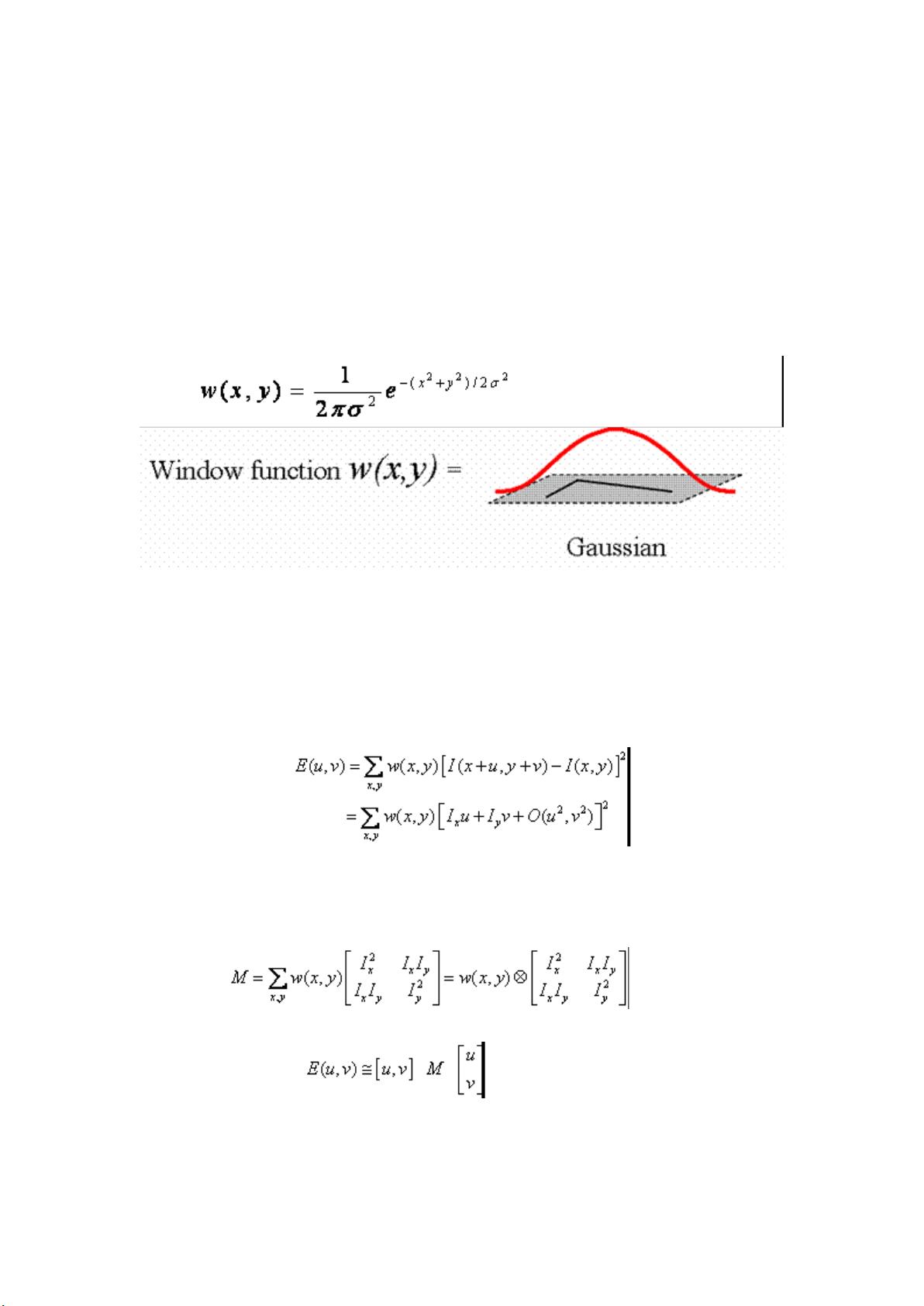
(1) Harris 算子用高斯函数代替二值窗口函数,对离中心点越近的像素赋于
越大的权重,以减少噪声影响。
图 1-3 高斯函数
(2) Moravec 算子只考虑了每隔 45 度方向,Harris 算子用 Taylor 展开去
近似任意方向。
写成矩阵形式:
(1- 2)
(1- 3)
式中,Ix 为 x 方向的差分,Iy 为 y 方向的差分,w(x,y)为高斯函数。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2016-04-12 上传
2019-05-08 上传
2008-10-24 上传
点击了解资源详情
点击了解资源详情

dujiacan
- 粉丝: 1
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
