自适应模糊控制:MIMO非线性系统输出跟踪的创新方法
145 浏览量
更新于2024-08-28
收藏 750KB PDF 举报
本文主要探讨了多输入多输出(MIMO)不确定非线性系统中的自适应模糊输出跟踪控制问题。在实际工业应用中,许多系统通常是非线性的,并且存在不确定性因素,这使得传统的控制方法可能难以应对。作者Bing Chen、Xiaoping Liu和Shaocheng Tong在2007年4月的《模糊系统交易》(IEEE Transactions on Fuzzy Systems, Vol.15, No.2)上发表的研究论文中,提出了一个创新的解决方案。
他们利用模糊逻辑系统来逼近系统中的未知非线性函数,这种方法能够有效处理系统复杂性。论文的核心是基于背步法的自适应模糊跟踪控制设计策略,这种策略具有最小的学习参数化,即通过逐步分解控制问题,将复杂性逐层降低,实现对系统输出的精确跟踪。他们的控制器设计确保了系统输出能够收敛到参考信号的邻域内,而且所有闭环系统中的信号都能得到半全局均匀最终有界的控制效果。
论文强调了适应性模糊控制的重要性,以及背步法在处理MIMO非线性系统输出跟踪中的优势。不确定性被纳入考虑,意味着该方法能够处理各种类型的不精确度或参数变化,从而提高了系统的鲁棒性和稳定性。为了验证这一理论的有效性,文中提供了两个具体的实例进行展示,这些例子表明了提出的控制策略在实际工程中的可行性。
这篇研究为处理多输入多输出不确定非线性系统中的模糊输出跟踪问题提供了一种新颖且有效的控制框架,对于提升这类系统的性能和适应性具有重要意义。
CHEN et al.: ADAPTIVE FUZZY OUTPUT TRACKING CONTROL OF MIMO NONLINEAR UNCERTAIN SYSTEMS 289
It is obvious that Assumption 1 requires the unknown func-
tions
are not zero. Without loss of generality, it is assumed
that
.
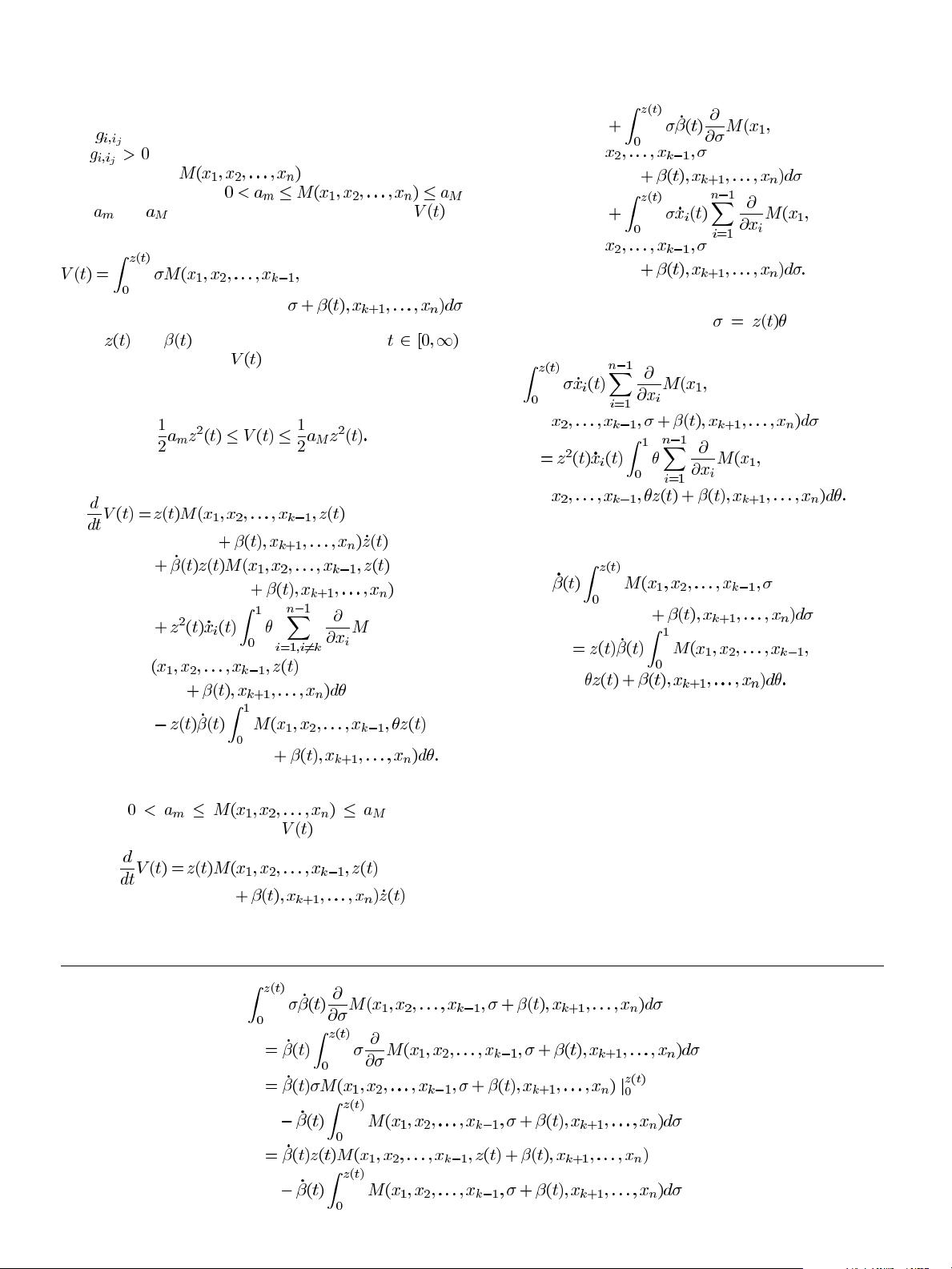
Lemma 2: Let
be a real-valued contin-
uous function and satisfy
with and being two constants. Define function as
follows:
where and are real-value functions with .
Then the integral function
has the following properties.
1)
2)
Proof: Conclusion 1 is obtained immediately from the in-
equalities
. To get the
second conclusion, differentiating
gives
(3)
A simple calculation gives (4), as shown at the bottom of the
page. By using the transformation
, the following
result is obtained:
(5)
Similarly
(6)
Therefore, Conclusion 2 follows immediately from substituting
(4)–(6) into (3).
III. A
DAPTIVE FUZZY
CONTROL DESIGN
In this section, the backstepping design technique is used to
design tracking controllers for all the subsystems of (1). Note
that all the subsystems in (1) are interconnected, the stability
analysis of whole closed-loop MIMO system becomes difficult.
But with the block-triangular property, it is feasible to design
(4)
剩余13页未读,继续阅读
2021-03-03 上传
2021-02-23 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-03 上传
2021-03-05 上传

weixin_38703794
- 粉丝: 3
- 资源: 889
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java-SpringBoot的基于算法的商品推荐系统毕业设计源码
- polish-roberta:RoBERTa波兰语模型
- mearby:ESP32专案
- png_java_twentyot4_potqfv_
- KuailewoAppServer:搞笑图片、搞笑音频、段子抓取 服务端代码
- Python库 | mypy-boto3-application-autoscaling-1.10.37.1.tar.gz
- HTML5版Flappy Bird游戏源码.zip
- Android-Design-Support-Library-Demo
- 基于ssm班主任助理系统.zip
- Arthas-WPFUI-master.rar
- effect-zoo:比较Haskell效果系统的人机工程学和速度
- VSR_三电平整流_三电平_vsr_三电平控制_三电平二极管钳位整流仿真_源码.rar.rar
- B-tree 树的 Java实现
- Java-SpringBoot的健身房预约信息管理系统毕业设计源码
- master-class-UX-UI:UXUI大师班的回购
- HTML5+Three.js实现的控制动画模型运动功能源码.zip
