"工业机器人自动运料小车路径规划与模块化设计研究"
版权申诉
137 浏览量
更新于2024-03-05
收藏 1.72MB DOC 举报
acturing industry evolving and automation increasing, the traditional fixed structure of industrial robots is proving to be inadequate. In order to meet the growing demands for automation, flexibility, and efficiency in material handling operations, the study of path planning for automated material handling vehicles has become crucial.
This paper presents a study on the design of a modular system for industrial robots in a production workshop. After analyzing the manufacturing processes and logistics systems of the workshop, a floor layout diagram is designed. By abstracting the floor layout of the rear-axle machining workshop, a path diagram for automated material handling vehicles is proposed using graph theory principles. Various path planning methods and genetic algorithm theory are studied, and a genetic algorithm is applied to solve a specific example in order to modularize the design of automated material handling vehicles.
Through the utilization of modular design, the limitations of traditional industrial robots are overcome. The flexibility and adaptability of the automated material handling vehicles are enhanced, allowing them to efficiently navigate the changing environment and tasks in the production workshop. This modular approach not only improves the overall efficiency of the manufacturing process but also sets the foundation for future advancements in automation and robotics in the industry.
In conclusion, the design of a modular system for industrial robots in a production workshop is essential for meeting the evolving demands of the manufacturing industry. By incorporating path planning and genetic algorithms, the modular design of automated material handling vehicles offers a flexible and efficient solution for material transport in the workshop. This research contributes to the advancement of automation and robotics in the industry, paving the way for more sophisticated and adaptable systems in the future.
(2)缩短了研制周期。能适应工厂用户的急需,在尽可能短的时间内,快速制造
出功能实用的满足用户要求的机器人产品。
(3)提高了性能价格比。采用优质功能部件集成的方式,有利于保证机器人的质
量和降低成本。
(4)具备了充分的柔性。以具备高可靠性的工控机为核心,控制模块和伺服模块
可根据机器人及相应周边设备的工作要求,综合运用步进驱动技术、交流伺服控制技
术、微机气动控制技术及变频技术等,为机器人提供了充分的柔性。
2.2 工业机器人结构配置方式及分析
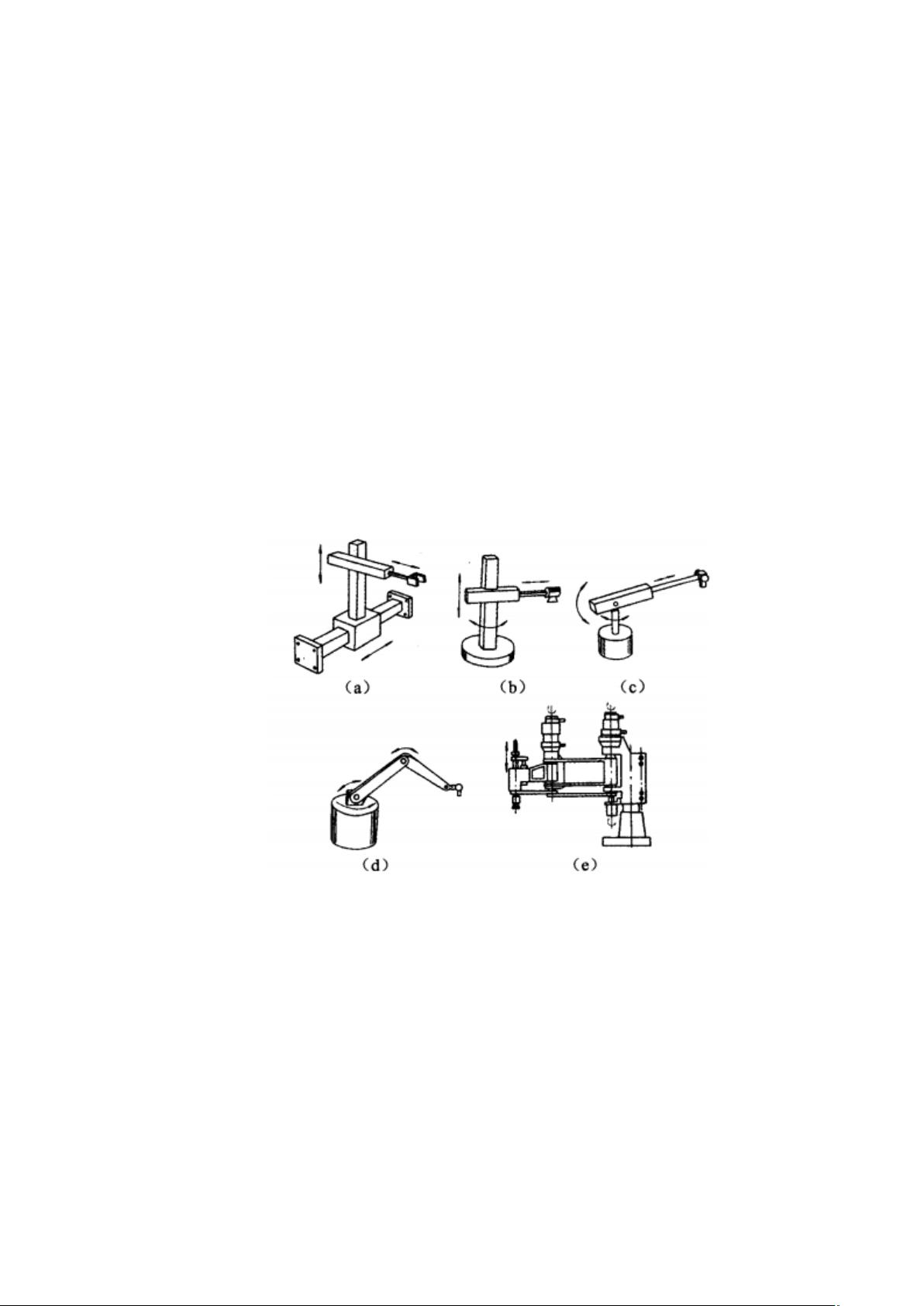
图 2-1 列出了几种常规的工业机器人配置方式,按不同的坐标进行配置可归纳为
以下几种:直角坐标型、圆柱坐标型、球坐标型、关节坐标型和平面关节型(SCARA
型)等。无疑,这些配置方式都是经过实践证明为经济可行的方式,也是组合式模块
化工业机器人坐标配置方式设计时所要借鉴和参照的方式
[ ]
9
。
图 2-1 工业机器人常规配置方式
(a)直角坐标型(b)圆柱坐标型 (c) 球坐标型
(d) 关节坐标型 (e) 平面关节型
通过对常用配置方式(常规坐标型)的机器人的运动分析可看到以下两点:(1)基
本动作可分解为体升降、臂伸缩、体旋转、臂旋转、腕旋转等;(2)基本运动形式可
分为直线运动和旋转运动两类。这启发我们在设计机器人时,可充分利用能够实现直
线运动和旋转运动的通用部件(气、液、电等)来进行功能组合,也就是说可以将经过
合适选择的通用部件作为模块来进行集成。这些部件可以作为一个独立的基本模块,
也可以将几个部件组合为一个复合模块。显然,配置方式应根据产品最终实现的功能

剩余45页未读,继续阅读
2023-07-11 上传
2023-07-12 上传
2024-04-19 上传
2022-07-15 上传
2019-09-06 上传
2021-09-21 上传

老帽爬新坡
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 算法
- ronald-mcdonald-house:费城罗纳德·麦克唐纳大厦(F2019)
- PINet
- windows6.11-KB976932-X86.exe.rar
- Diarios online sin registro-crx插件
- rest-api:用于Reconmap的REST API后端
- analytical_procedures_gl:出于审计目的执行日记帐分录测试!
- hello-word:丘丘球菌
- aws-playground:该存储库包含我对AWS的实验
- 园林绿化景观施工组织设计-园林景观工程施工方案
- abc196
- eslint-config
- AGU_PiedPiper.github.io:这是青山学院大学染色吹笛者编程爱好者协会的网站。
- DaisyDiff:Java 中 HTML 的视觉比较
- CouponBook:优惠卷卡包系统(慕课)
- 广场
