ABB机器人IO信号配置详解:步骤与参数设置
需积分: 0 113 浏览量
更新于2024-08-03
收藏 1.01MB PDF 举报
本文档详细介绍了ABB机器人的IO信号配置过程,对于理解和操作此类设备至关重要。首先,我们了解到定义输入输出信号是配置的核心步骤,这是在ABB控制面板的"Configuration"选项中进行的。在开始配置前,用户需要确保已经为机器人安装了相应的输入输出板,因为这些板是信号传输的基础。
在定义信号时,有以下几个关键要素:
1. 信号名称(Name):这是输入输出信号在系统中的唯一标识,必须是16位字符长度,且首位必须是字母。名称的准确性和唯一性对于信号的管理和追踪至关重要。
2. 信号类型(Type of signal):用户需要根据实际需求从提供的信号类型列表中选择,如数字输入(DI)或通用输入(GI),以及其他可能的信号类型,如模拟输入/输出、脉冲等。
3. 分配到单元(Assigned to unit):用户需将信号关联到特定的输入输出板,这有助于组织和管理信号的分布。
4. 物理端口映射(Unit mapping):此步骤涉及将信号的实际物理连接到机器人系统的接口,这依赖于输入输出板的规格和布局。
5. 访问级别(Access level):设置信号的权限级别,确保只有授权的操作员可以访问和更改该信号,这对于安全控制非常关键。
对于数字输入信号,文档还特别强调了两个滤波时间参数:
- 低电平保持时间(Filtertimepassive):当信号由高电平变为低电平时,这个时间参数确保了机器人系统在接收到新状态之前等待一段时间,防止瞬间切换导致的误操作。默认最小值为10毫秒,最大值为32秒。
- 高电平保持时间(Filtertimeactive):同样,当信号由低电平变为高电平时,系统会等待这个时间段,确保信号稳定后再处理。这也是为了系统的稳定性和可靠性。
理解并正确配置这些参数是机器人编程和维护的重要环节,能够直接影响到机器人的精确控制和工作效率。在实际操作中,务必遵循文档指导,并结合具体应用场景进行灵活调整。
定 义 输 入 输 出 信 号
进入主窗口
进入主窗口进入主窗口
进入主窗口
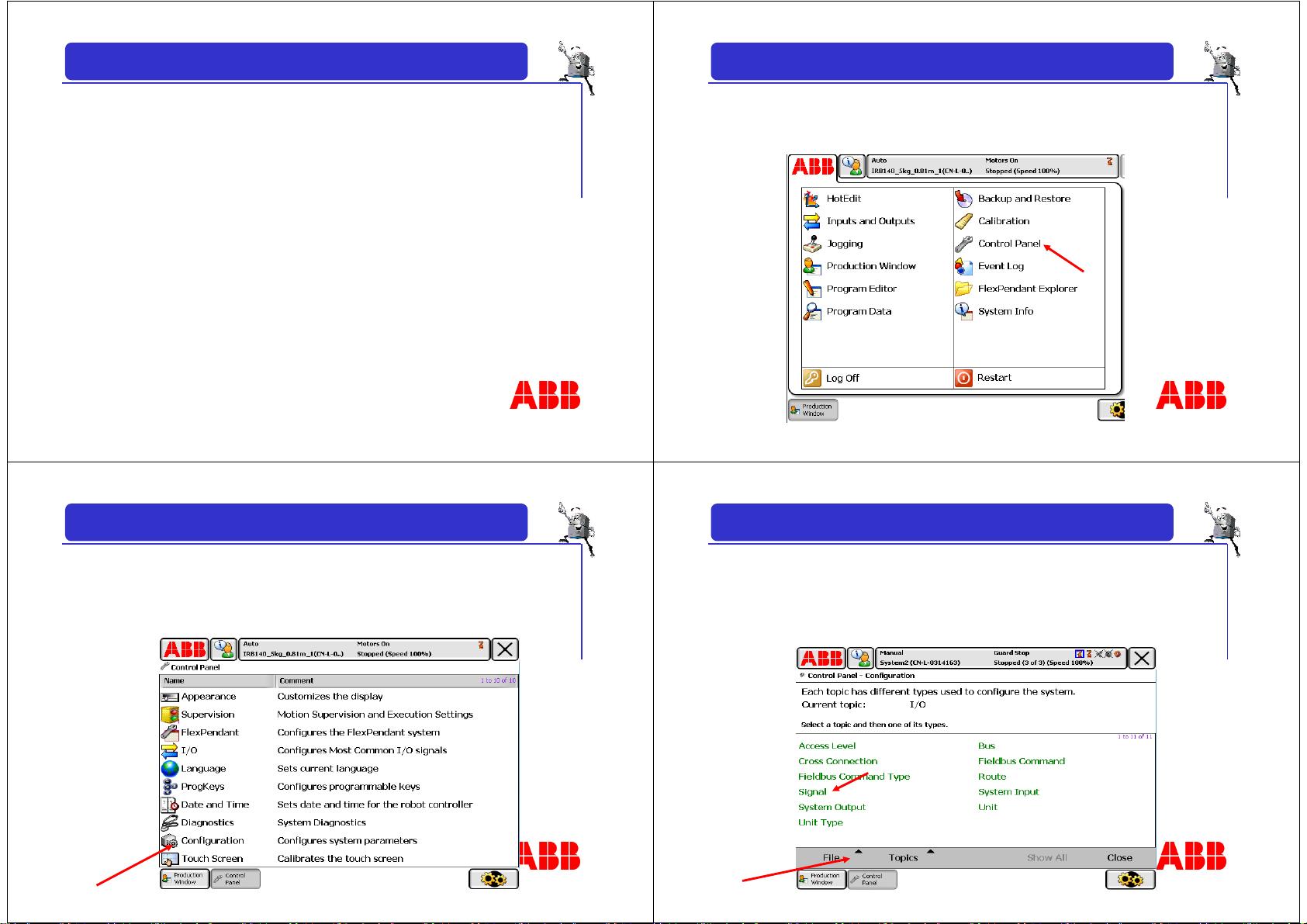
点击ABB主菜单, -> 选择 Control Panel
进入控制面板窗口
进入控制面板窗口进入控制面板窗口
进入控制面板窗口
• 进入Control Panel 窗口后, 选择
Configuration
定义输入输出信号
定义输入输出信号定义输入输出信号
定义输入输出信号
• 只有完成定义输入输出板,才能定义相应
的输入输出信号。
• 点击
Topics菜单,选择I/O后,在列表中点击
Signal。
下载后可阅读完整内容,剩余3页未读,立即下载
2023-02-27 上传
2022-06-15 上传
2022-07-01 上传
2021-03-22 上传
2023-07-25 上传
2021-04-06 上传
2020-05-11 上传
2022-06-26 上传
2010-10-05 上传

2301_80963660
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
