直线二级倒立摆的建模与LQR控制详解
版权申诉
直线二级倒立摆的建模和控制综述是一篇针对复杂系统控制问题的研究论文,主要探讨了西南科技大学自动化专业方向的学生如何通过设计任务来深入理解并解决倒立摆系统的控制挑战。倒立摆作为一个典型的非线性、强耦合、欠驱动系统,其动态特性对于控制理论具有重要价值,尤其在机器人技术、航空航天等领域中有着实际应用。
首先,设计者需要构建直线二级倒立摆的数学模型,这通常通过拉格朗日方程进行,以描述其在垂直方向上的运动行为。在工作点附近,系统被线性化以便于后续处理。线性二次调节器(LQR)的基本原理被用来设计控制器,通过Matlab的内置函数实现,以实现系统在平衡状态下的最优控制。
然后,利用Simulink软件平台,设计者搭建了倒立摆的控制系统,并进行了仿真实验。这个过程不仅涉及控制器的设计和实施,还包括对仿真结果的分析,以评估控制策略的有效性和性能。在这个阶段,学生需要理解并应用最优控制算法,如LQR,来确保倒立摆能在扰动下快速恢复平衡。
关键词“倒立摆”、“建模”、“LQR”和“镇定控制”强调了文章的核心内容,即如何通过精确的数学模型和优化的控制算法来稳定倒立摆,使其保持平衡状态。整个设计过程不仅提升了学生的理论知识,还锻炼了他们的实践能力和问题解决技巧,为他们今后在相关领域的工作打下了坚实的基础。
这篇综述文档深入探讨了直线二级倒立摆的建模技术、线性化处理、LQR控制器设计以及通过仿真验证控制效果的方法,是理解倒立摆控制系统的重要参考资料。
一、设计目的和意义
二、控制要求
对直线二级倒立摆模型的物理特性做分析,然后利用拉格朗日方程建模方法建立倒立摆的
数学模型。利用线性二次最优控制理论设计倒立摆的 LQR 镇定控制器,在 Matlab 和 Simulink
中完成倒立摆的镇定控制仿真,得出倒立摆 LQR 控制器设计规律。
三、设计方案论证
牛顿力学建模方法:根据传统的牛顿力学分析,建立二级摆动力学方程,最后经过求解方程建
立系统的数学模型。
特点:分析通俗易懂,但需要求解大量微分方程,计算复杂;对于二级以上倒立摆建模很少使
用。
拉格朗日建模方法:基于广义力和广义坐标的系统能量法,需要求出系统的动能和势能,建立
Lagrange 方程。
特点:理论较难,但建模简单,可以编程求解方程。
四、系统设计
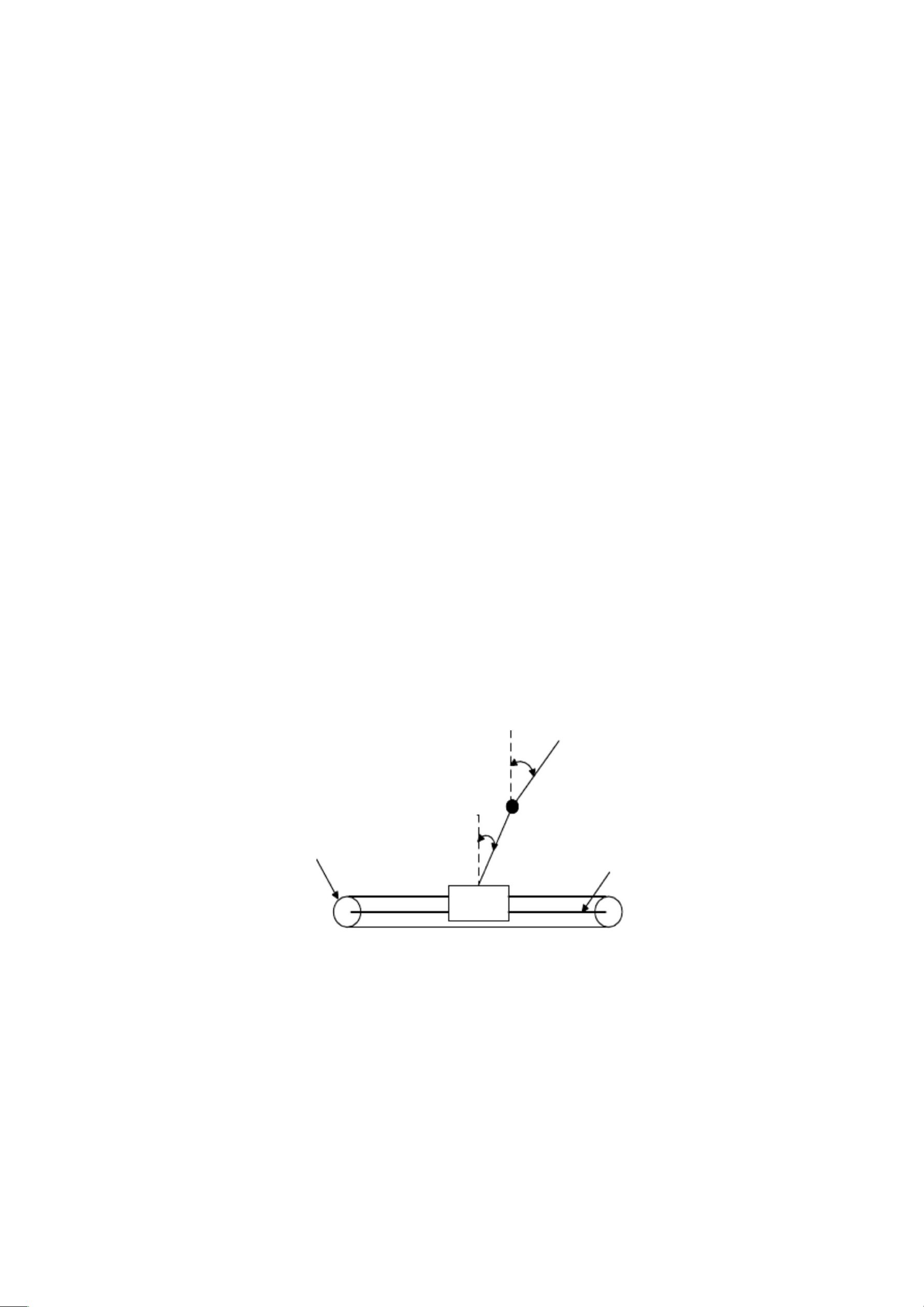
倒立摆系统是由导轨、小车和各级摆杆组成,本文研究的直线二级倒立摆的物理结构如图
1-1 所示。小车依靠直流电机施加的控制力,可以在导轨上左右移动,其位移和摆杆角度信息
由传感器测得,目标是使倒立摆在有限长的导轨上竖立稳定,达到动态平衡。
摆杆2
质量块1
1
电机
摆杆1
滑动轴
皮带
小车
图 1-1 直线二级倒立摆的物理结构
其中,双摆系统由摆杆 1、摆杆 2、质量块 1、小车和基座组成。摆杆 1 与摆杆 2 由质量
块 1 连接,摆杆1 与基座都由带滚动轴承的旋转轴自由相连。小车装在滑动轴上,通过电机带
动皮带使小车移动。为了测量摆杆的转角,转轴上安装有增量式角度编码器,内杆与小车连接
处的角度编码器的质量可直接考虑为小车质量的一部分,故图中只表注了内外杆连接处的编码
器质量块 1。两个摆杆不带动力源,两摆杆的运动控制只能通过小车的移动来实现。计算机从
运动控制卡中读取实时数据,确定控制决策,并由运动控制卡来实现该控制决策,产生相应的
控制量,使电机转动,带动小车运动,保持摆杆的平衡。当把摆杆提起到平衡位置附近后放开,
5
剩余20页未读,继续阅读
2022-07-10 上传
2022-07-10 上传
2022-07-09 上传
2022-07-10 上传
2022-05-30 上传
2021-10-08 上传
2022-06-01 上传
2023-10-16 上传
2022-07-08 上传

不吃鸳鸯锅
- 粉丝: 8514
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机软件-编程源码-酒店餐馆系统.zip
- K4:项目 K4 - Telepresence Bot-源码
- 基于asp.net的学生宿舍管理系统(源码+数据库+报告).zip
- matlab精度检验代码-cardio24:在线诊断平台,可以持续监控心电图
- 行业分类-设备装置-多媒体数据传输速率的自适应估算方法.zip
- libcrowds:LibCrowds众包平台的前端
- 七夕情人节html代码.zip
- 链表HuffmanTree.rar
- GameEnJine:Java 2D游戏引擎
- [浙江]杭州现代风格高端住宅建筑方案设计
- 定时器控制流水灯高低4位交替闪烁_instants2o_定时器控制流水灯高低4位交替闪烁_定时器流水灯_四位流水灯_
- MicroServicesOnAWS:AWS上的微服务课程材料
- slf4j-log4j12-1.7.14.jar中文-英文对照文档.zip
- 2015年研究生数学建模竞赛优秀论文选.rar华为杯
- Desktop.zip
- python爱心代码合集 (12).zip
