MATLAB与Simulink在建模与控制中的应用
199 浏览量
更新于2024-08-04
收藏 392KB DOC 举报
"MATLAB和Simulink是两个强大的工具,常用于工程领域的建模与控制。这份文档通过一个直流电机和磁悬浮系统的实例,详细解释了如何利用MATLAB和Simulink进行建模、分析以及控制器设计。文档假设读者已经具备MATLAB和Simulink的基础知识,主要关注的是Control System Toolbox函数的应用。建议读者在阅读时同时在MATLAB环境中尝试相关命令。示例代码由作者编写并提供下载,适用于MATLAB 5.3版本,同时也已在5.2版本中测试通过。
在直流电机的建模部分,我们首先会了解如何建立一个线性模型。这包括分析模型在MATLAB中的特性,如极点和零点、频率响应和时间域响应等。接下来,我们将学习如何设计控制器,并在SIMULINK环境中模拟开环和闭环系统。
2.1 物理系统
以一个直流电机为例,其电枢电路和转子的自由体图被考虑进来。直流电机的工作原理是通过改变施加在电枢上的电压来控制电机的转速。电枢电路涉及电机内部的电磁相互作用,而自由体图则描绘了转子在磁场中的动态行为。在建模过程中,我们需要考虑电机的电气和机械特性,如反电动势(Back EMF)、电枢电阻、转动惯量和摩擦力矩等。
2.2 建立数学模型
在MATLAB中,我们可以使用符号计算工具箱(Symbolic Math Toolbox)或控制系统的工具箱(Control System Toolbox)来建立电机的传递函数或状态空间模型。这通常涉及到将物理方程转化为微分方程,然后线性化得到适合控制系统设计的数学模型。
2.3 分析模型
一旦模型建立,我们可以在MATLAB中进行各种分析。例如,通过计算系统的极点和零点来确定系统的稳定性;通过频率响应分析了解系统的频率特性;通过时域响应分析评估系统的瞬态性能。
2.4 控制器设计
在MATLAB的控制工具箱中,可以使用PID控制器、状态反馈控制器或其他先进控制策略对电机进行控制设计。目标可能包括跟踪设定值、抑制扰动或者优化性能指标。
2.5 SIMULINK仿真
在SIMULINK环境下,我们可以搭建开环和闭环控制系统,通过图形化的块图来直观地表示系统的结构。在仿真中,可以观察电机的动态行为,验证控制器的效果,调整参数以达到预期的性能。
3. 磁悬浮系统建模与控制
除了直流电机,文档还可能涵盖了磁悬浮系统的建模和控制。磁悬浮系统是一种复杂的非线性系统,它的建模通常需要考虑更多的物理效应,如电磁力、空气阻力和系统动力学。控制设计可能会涉及到滑模控制、自适应控制等高级技术。
总结来说,"MATLAB和Simulink的建模与控制"文档提供了实践性的指导,通过实例帮助读者掌握这两个工具在控制系统设计中的应用,涵盖了从基本的模型建立到高级的控制策略实施的全过程。对于想要深入理解和应用MATLAB及Simulink的工程师和学生来说,这是一个宝贵的资源。
出处:http://www.dcsc.tudelft.nl/~sc4050/transp/refresher.pdf
Matlab and Simulink for Modeling and Control
1 Introduction
With the help of two examples, a DC motor and a magnetic levitation system, the use of
MATLAB and Simulink for modeling, analysis and control design is demonstrated. It is assumed
that the reader already
has basic knowledge of MATLAB and Simulink. The main focus is on the use of the Control
System Toolbox functions. We recommend the reader to try the commands out directly in
MATLAB while reading this text. The examples have been implemented by the authors and can
be downloaded from http://lcewww.et.tudelft.nl/.et4092. The implementation is done in MATLAB
version 5.3 and has also been tested in version 5.2.
2 Modeling a DC Motor
In this example we will learn how to develop a linear model for a DC motor, how to analyze the
model under MATLAB (poles and zeros, frequency response, time-domain response, etc.), how to
design a controller, and how to simulate the open-loop and closed-loop systems under
SIMULINK.
2.1 Physical System
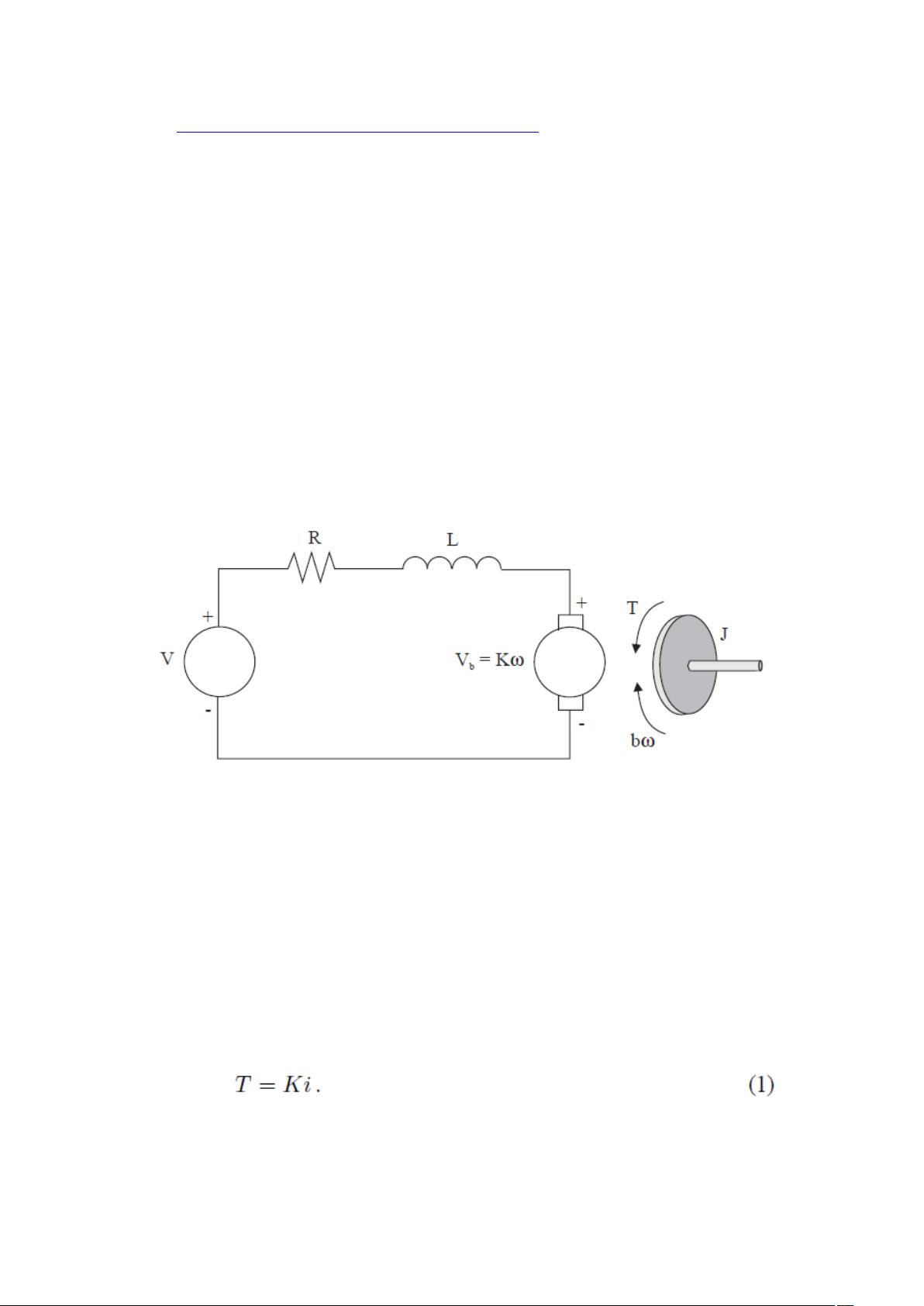
Consider a DC motor, whose electric circuit of the armature and the free body diagram of the rotor
are shown
in Figure 1.
Figure 1: Schematic representation of the considered DC motor.
The rotor and the shaft are assumed to be rigid. Consider the following values for the physical
parameters:
moment of inertia of the rotor J =0.01 kg_ m2
damping (friction) of the mechanical system b =0.1 Nms
(back-)electromotive force constant K =0.01 Nm/A
electric resistance R = 1
electric inductance L = 0.5 H
The input is the armature voltage V in Volts (driven by a voltage source). Measured variables are
the angular velocity of the shaft ω in radians per second, and the shaft angle θ in radians.
2.2 System Equations
The motor torque, T , is related to the armature current, i, by a constant factor K :
The back electromotive force (emf), Vb, is related to the angular velocity by:
下载后可阅读完整内容,剩余9页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-10-23 上传
2022-07-05 上传
2022-07-05 上传
2022-10-20 上传

zzzzl333
- 粉丝: 809
- 资源: 7万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 淘淘商城源码-Java代码类资源
- mybatis - Springboot+Mybatis+MySql搭建实例.zip
- 商务团队背景的商务幻灯片下载PPT模板
- Python库 | VizKG-0.0.3-py3-none-any.whl
- 直方图修改:代码执行直方图修改-matlab开发
- Android-project-FishPond:ZJU中的Android课程,这是名为FishPond的最终项目,这是一个适合时间大师的应用
- mm-screen:马克·米纳维尼(Mark Minervini)在“像股票向导一样交易”一书中描述的股票筛选器,用于识别超级绩效股票
- POO-2021
- SergioHPassos.github.io
- Quarantine-Friends:编码Dojo小组项目
- code-red:可视化代码 RED
- EpigenomicsTask_MscOmics
- VK-DMR:VK DMR文件
- kiwi:简约的内存键值存储
- Trex-Game-2:有游戏结束条件
- Python库 | vizex-2.0.4-py3-none-any.whl
