机器人感知与传感技术在移动和操纵中的应用
"这篇资料主要探讨了机器人感知与传感在机器人移动性和操作中的角色,涉及视觉、立体感测、范围传感器、声学等多种感知技术,以及它们在定位、避障、交互和学习等方面的应用。"
在机器人技术领域,感知与传感是实现机器人智能行为的关键组成部分。"Perception & Sensing in Robotic Mobility and Manipulation"这一主题涵盖了机器人如何理解和适应其环境,以及如何有效地执行任务。
首先,"Where am I relative to the world?" 这一问题揭示了机器人定位的重要性。通过使用视觉传感器(如摄像头)、立体感测(用于深度信息获取)和范围传感器(如激光雷达),机器人可以收集环境数据。这些传感器帮助解决场景建模、分类和识别的问题。集成的本地化和映射算法(例如同时定位与映射,SLAM)使机器人能够确定自身位置并构建周围环境的地图。
其次,"What is around me?" 强调了环境感知。除了上述传感器,还包括声学、声音和嗅觉传感器,用于更全面的环境感知。机器人通过对象识别、从各种输入(如视觉或声学)中重建结构,以及定性建模来理解周围环境。这些能力对于避障和导航至关重要,并且可以通过学习持续改进。
再者,"How can I safely interact with the environment (including people!)?” 这部分讨论了机器人与环境安全交互的问题。除了视觉和范围传感器,触觉传感器(包括力和触觉反馈)也起着关键作用。这些传感器帮助机器人估计形状、范围、材质、大小和重量,从而实现精确的导航、操作控制和学习。
最后,"How can I solve ‘new’ problems (generalization)?" 是对机器人适应性和泛化的探索。通过视觉、范围、触觉以及可能的新传感器,机器人可以学习对未知情况的分类。这涉及到将已知知识应用到新情境中,形成一种模式识别和问题解决的能力。
这份资料深入介绍了机器人感知系统如何通过多种传感器技术与环境互动,进行定位、避障、物体识别、环境建模,以及如何学习和适应新情境。这些技术的发展对于推动机器人在现实世界中的广泛应用具有重要意义。
!"# $% & '(# )% "*+%*,%-% #)(.
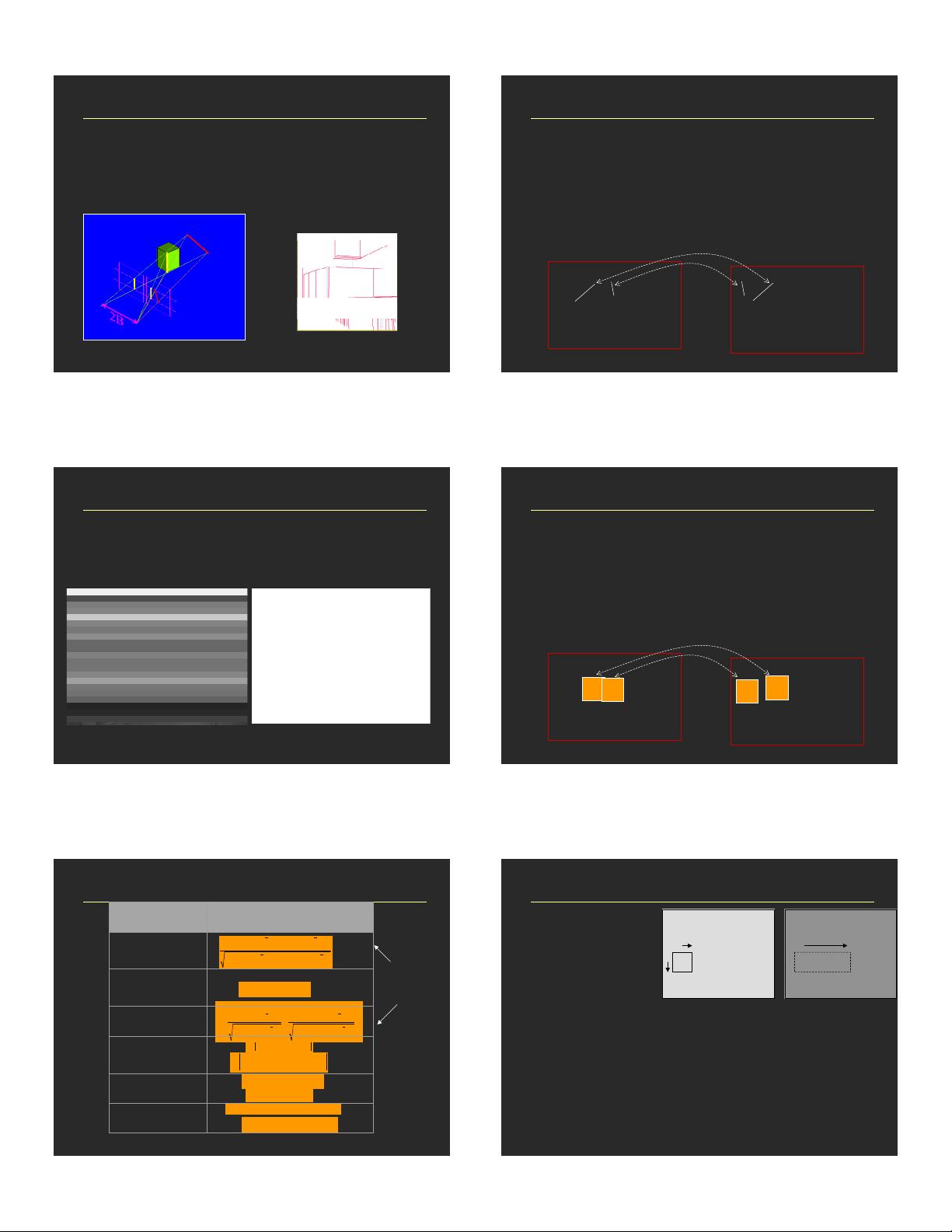
Correspondence Problem:
How to find corresponding areas of two camera
images (points, line segments, curves, regions)
Stereo-Based Reconstruction
!"# $% & '(# )% "*+%*,%-% #)(.
MATCHING AND CORRESPONDENCE
• Two major approaches
– feature-based
– region based
In feature-based matching, the idea is
to pick a feature type (e.g. edges),
define a matching criteria (e.g.
orientation and contrast sign), and
then look for matches within a
disparity range
!"# $% & '(# )% "*+%*,%-% #)(.
Results - Reconstruction
!"# $% & '(# )% "*+%*,%-% #)(.
MATCHING AND CORRESPONDENCE
• Two major approaches
– feature-based
– region based
In region-based matching, the
idea is to pick a region in the image
and attempt to find the matching
region in the second image by
maximizing the some measure:
1. normalized SSD
2. SAD
3. normalized cross-correlation
!"# $% & '(# )% "*+%*,%-% #)(.
Match Metric Summary
I
1
u, v
( )
! I
1
( )
" I
2
u + d, v
( )
! I
2
( )
u, v
#
I
1
u, v
( )
! I
1
( )
2
" I
2
u + d, v
( )
! I
2
( )
2
u, v
#
u, v
#
( ) ( )( )
!
+"
vu
vduIvuI
,
2
21
,,
( )( )
( )( )
( )( )
( )( )
!
!!
"
"
"
"
#
$
%
%
%
%
&
'
(+
(+
(
(
(
vu
vuvu
IvduI
IvduI
IvuI
IvuI
,
2
,
2
22
22
,
2
11
11
,
,
,
,
( ) ( )
!
+"
vu
vduIvuI
,
21
,,
( ) ( )
( )
!
+"
vu
vduIvuI
,
'
2
'
1
,,
( ) ( ) ( )
!
<=
nm
kkk
vuInmIvuI
,
'
,,,
( ) ( )
( )
!
+
vu
vduIvuIHAMMING
,
'
2
'
1
,,,
( ) ( ) ( )( )
vuInmIBITSTRINGvuI
kknmk
,,,
,
'
<=
MATCH METRIC DEFINITION
Normalized Cross-Correlation
(NCC)
Sum of Squared Differences
(SSD)
Normalized SSD
Sum of Absolute Differences
(SAD)
Zero Mean SAD
Rank
Census
Remember, these
two are actually
the same
( ) ( )
!
"+""
vu
IvduIIvuI
,
_
22
_
11
),(),(
!"# $% & '(# )% "*+%*,%-% #)(.
Correspondence Search Algorithm
For i = 1:nrows
for j=1:ncols
best(i,j) = -1
for k = mindisparity:maxdisparity
c = ComputeMatchMetric(I
1
(i,j),I
2
(i,j+k),winsize)
if (c > best(i,j))
best(i,j) = c
disparities(i,j) = k
end
end
end O(nrows * ncols * disparities * winx * winy)
end
I
1
I
2
u
v
d
I
1
I
2
u
v
d
剩余13页未读,继续阅读
2020-04-27 上传
2019-03-11 上传
2022-01-03 上传
2016-02-29 上传
2009-02-27 上传
2017-11-30 上传
2022-11-27 上传
2021-03-09 上传
2023-12-23 上传

malcolm_nan
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
