NAO机器人连接与Choregraphe基础操作教程
需积分: 49 10 浏览量
更新于2024-09-07
8
收藏 193KB DOCX 举报
本篇文档主要介绍了NAO机器人的使用指导,重点在于Choregraphe软件的操控和Python编程的开发。首先,用户需要了解如何通过无线或有线方式连接NAO机器人,实验室内的机器人已经预设了WiFi连接,通过填写NAO的IP地址(可通过胸口按键获取,需要网络连接),在Choregraphe软件中进行连接。对于有线连接,用户需使用网线将机器人与电脑相连,连接过程类似。
Choregraphe软件是一个集成度高且易于使用的工具,适用于一般表演和展示,它提供了直观的图形化编程界面,用户可以通过拖拽预设的指令盒如"SpeechReco", "SwitchCase", 和"Say"来创建简单的动作序列。例如,通过设置语音识别和反应,让机器人执行一系列指令,如问候和动作变换。然而,由于软件的局限性,与传感器相关的程序必须在实体机器人上执行,虚拟机器人无法模拟这些功能。
对于想要进一步深入研究或者进行更复杂工程开发的用户,文档推荐转而使用Python进行NAO的编程。首先,需要安装Choregraphe及其内部的NAOqi库,确保Python2.7版本的正确安装,并将其添加到系统的环境变量中。这样可以在命令行中轻松验证Python环境是否配置成功。接下来,要配置NAO的Python编译环境,这通常涉及设置特定路径以访问NAO的Python模块。
Python开发对于NAO机器人具有更高的灵活性和扩展性,能够实现更高级的功能,比如自定义传感器读取、算法应用以及与外部设备的交互。然而,这需要一定的编程基础和对机器人操作系统(Robot Operating System, ROS)的理解。本资源为初学者提供了Choregraphe入门和Python进阶的路径,有助于用户根据自身需求选择合适的开发工具和技术。
1、机器人软件安装及界面介绍详见《Choregraphe 软件安装》文档
2、Choregraphe 软件使用(可先参考《Choreographe 编程》文档)
下面我通过一个简单的例子来介绍如何使用该软件
首先连接机器人,有无线和有线两种方式,实验室的机器人都已设置好,可
以直接连接 351 室的 WiFi 进行连接
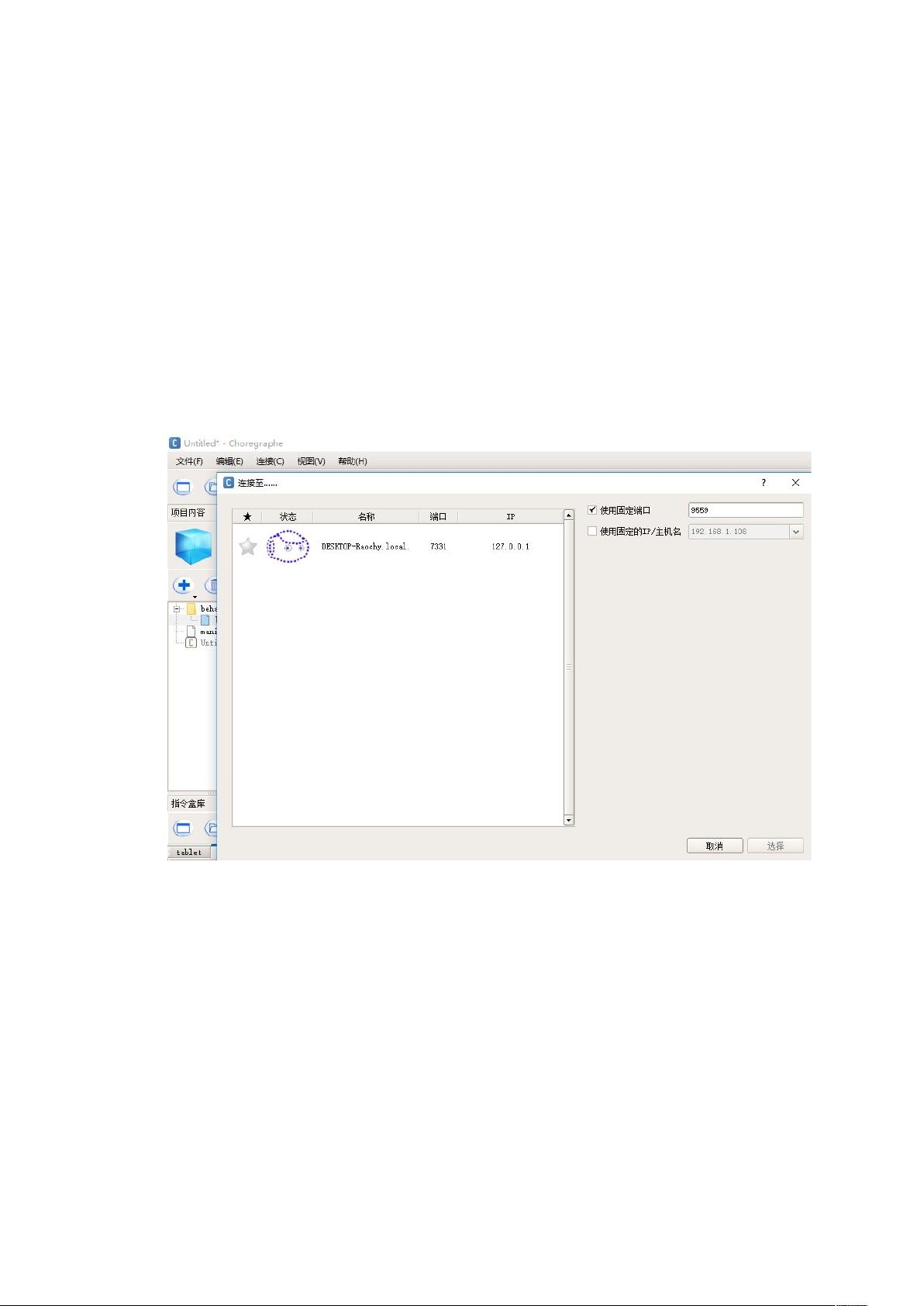
点击工具栏中“连接” – “连接至”
在使用固定的 ip/主机名中填写 NAO 的 ip(可以摁 NAO 胸口键获得,需联
网)后,点“选择“进行连接
若是有线,则将机器人和电脑用网线连接,获取到 ip 后连接方法同上
若是不在实验室无法使用实体机器人,那么有关机器人动作之类的程序可以
在虚拟机器人上执行,和传感器有关的程序则不能。
虚拟机器人连接方法:“连接“ -- ”连接至虚拟机器人”
下载后可阅读完整内容,剩余5页未读,立即下载
2021-05-05 上传
2019-09-18 上传
2017-03-26 上传
2021-08-14 上传
2011-11-16 上传
2022-06-14 上传
2021-08-14 上传
2022-06-30 上传

A1027262901
- 粉丝: 4
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
