"Basys2智能小车硬件课设报告及代码分享"
需积分: 16 108 浏览量
更新于2024-01-30
2
收藏 1.76MB PDF 举报
智能小车团队报告
摘要:
本报告是一份关于基于Basys2开发板的智能小车实验的团队报告。报告包括了实验的设计目标、开发过程、硬件设计和软件实现等方面的内容。通过实验,我们成功开发了一台能够自主控制行动、避开障碍物、识别环境并遵循指令的智能小车。在实验过程中,我们遇到了一些挑战,但通过团队的合作和努力,最终取得了成功。本报告还附有部分实验代码,供其他选择Basys2开发板的同学们参考。
第一章 设计目标
1.1 设计目的
本次实验的设计目的是通过使用Basys2开发板和相关的传感器、执行器等元件,开发一台能够自主控制行动的智能小车。小车需要能够识别环境中的障碍物,并能够避开它们。另外,小车还需要能够根据指令进行移动,例如向前、向后、左转和右转等操作。通过实现这些功能,我们可以验证智能车辆的自主性和灵活性。
第二章 开发过程
2.1 硬件设计
在硬件设计方面,我们选择了Basys2开发板作为主要控制板。该开发板具有较强的处理能力和丰富的外部接口,可以方便地连接感应器、执行器等元件。我们使用的传感器包括红外避障传感器、颜色识别传感器和声音传感器等。执行器则包括电机和舵机等。通过合理设计硬件电路,我们能够有效地感应环境信息,并对车辆的运动进行控制。
2.2 软件实现
在软件实现方面,我们使用Verilog HDL进行编程。Verilog HDL是一种硬件描述语言,我们可以使用它对硬件电路进行描述和模拟。我们根据实验的需求,编写了相应的Verilog代码。通过调试和测试,我们保证了代码的正确性和稳定性。同时,我们还编写了控制程序,用于控制小车的行动。通过编写合适的控制程序,我们能够使小车自主地避开障碍物,并能够灵活地按照指令进行移动。
第三章 实验结果
经过实验,我们成功开发了一台能够自主控制行动、避开障碍物、识别环境并遵循指令的智能小车。我们对小车进行了多次测试,结果表明小车的运动准确性和稳定性都很好。小车能够准确地避开障碍物,并能够根据指令进行移动。同时,小车还能够识别环境中的颜色和声音等信息,并根据这些信息做出相应的反应。整个实验的效果非常满意,达到了我们的预期目标。
第四章 总结与展望
通过这次实验,我们深入学习了智能车辆的硬件设计和软件实现等方面的知识。我们充分理解了智能车辆的工作原理和实现方法。在实验过程中,我们不仅掌握了Verilog HDL的使用技巧,还学会了合理选择硬件电路和元件,以及进行调试和测试的技巧。通过团队的合作和努力,我们成功地开发了一台功能完善的智能小车。
展望未来,我们希望能够进一步完善智能小车的功能和性能。例如,我们可以增加更多的传感器,如摄像头和红外测温传感器等,以提高小车的感知能力。另外,我们还可以改进控制算法,提高车辆的运动速度和精确度。随着技术的不断进步,智能车辆在各个领域的应用前景将会更加广阔。
最后,感谢指导老师闵玉堂的悉心指导和支持,使我们能够顺利完成这次实验。同时,也感谢华中科技大学电子信息与通信工程学院的支持和鼓励。通过这次实验,我们不仅提高了实际动手能力,还增加了对硬件设计和智能车辆等领域的了解。这将对我们今后的学习和发展产生积极的影响。
3
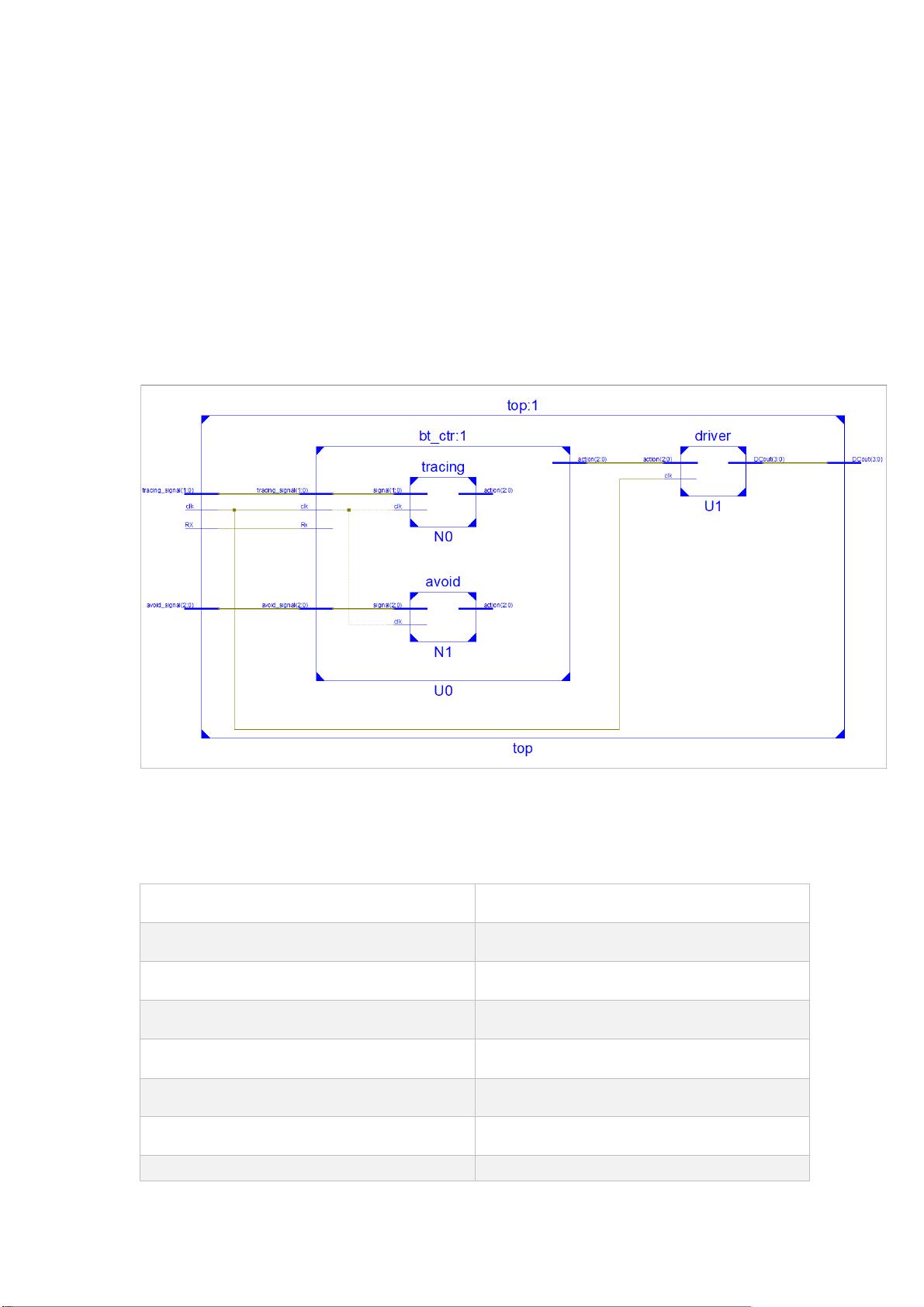
第二章 系统总体设计
2.1 系统框图
2.1.1 整体设计框图
预计达到效果
表 2.1 不同按钮对应发送的字符
点击事件
发送字符
循迹
Z
避障
B
前进
1
后退
2
左
8
右
z
停止
Q
剩余33页未读,继续阅读
354 浏览量
2023-05-05 上传
2023-04-17 上传
111 浏览量
2021-07-12 上传
155 浏览量
2021-11-15 上传

Zzf丶
- 粉丝: 2
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- attention
- worker-manager:您是否希望执行长时间运行的任务而又不会阻塞您的主要流程?
- ipmail-开源
- URP Shadow Receicer Shader
- systemjs-mocha-spike:SystemJS Mocha Spike
- 兄弟姐妹重布线:波哥大大学(Proyecto de la lagogo)毕业于JoséManuelGalán和Virginia Ahedo。 铝制耐火材料生产商协会,墨西哥铝业联合公司
- pity-calc:找出Genshin Impact可惜的计算器
- watershed.zip
- Memo-code-snippets-and-notes:杂项代码段和注释
- springboot075基于SpringBoot的电影评论网站系统(开题报告+论文)
- TogglWeekByTag:用于按标签进行 Toggl 每周报告的 Chrome 扩展
- C#快速学习笔记.rar
- proyecto_m17
- poc-bradesco:我旁边的Pruebas de aplicacion
- 保险行业培训资料:少儿险主打产品介绍
- 项目案例-班级管理系统
