Project Server 2007 安装配置指南
需积分: 9 58 浏览量
更新于2024-07-29
收藏 1.78MB PDF 举报
"该资源是关于配置Project Server 2007的详细步骤说明,由一系列屏幕截图组成,包括从安装.NET Framework 3.0到配置Project Server 2007,再到安装Project Professional 2007和设置服务器账户。整个过程分为四个阶段:阶段1是.NET Framework 3.0的安装,阶段2是Project Server 2007的安装,阶段3是Project Server 2007的配置,阶段4是Project Professional 2007的安装和服务器账户配置。"
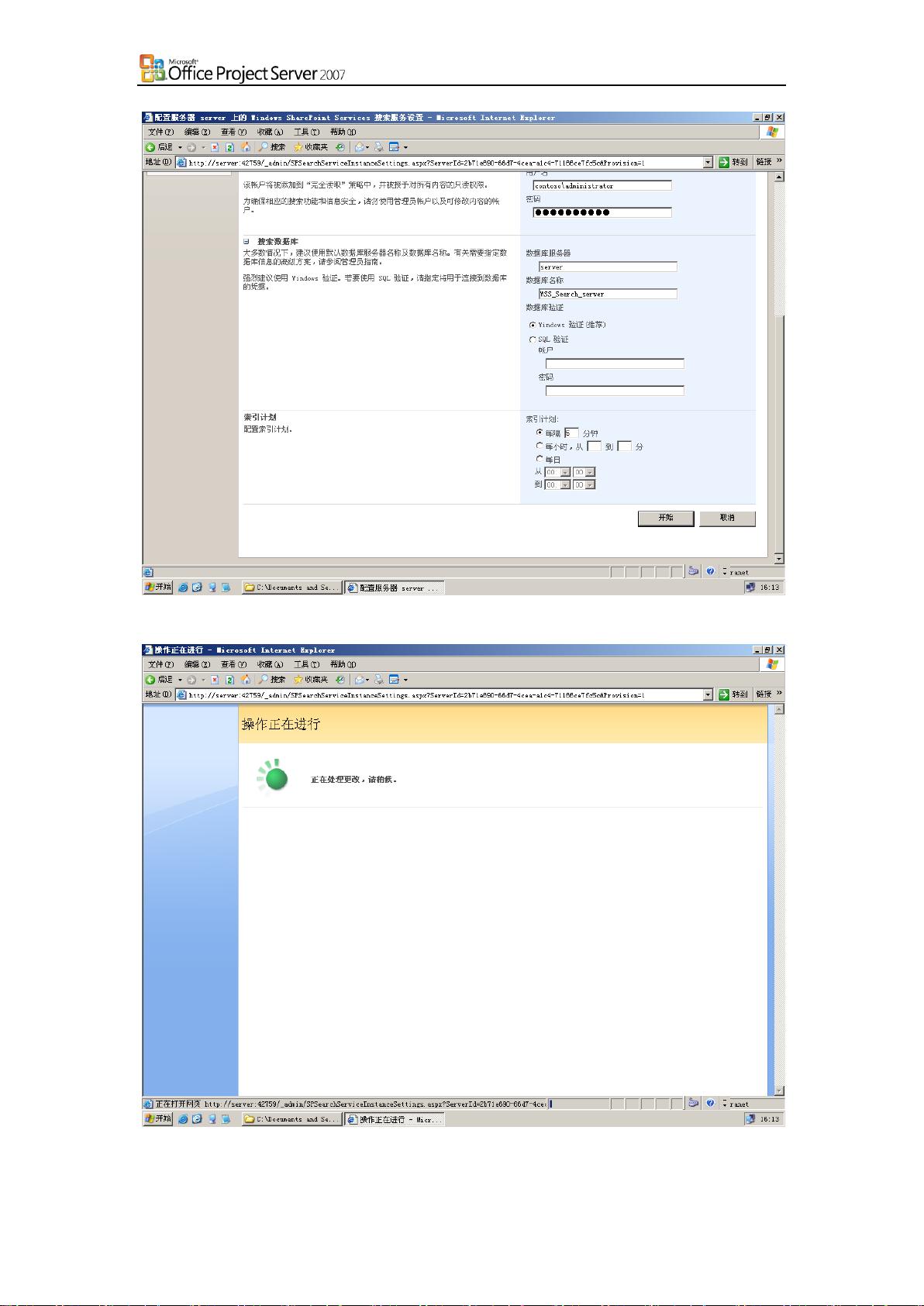
在配置Project Server 2007的过程中,首先需要启动配置Web界面,并选择相应的服务配置模式,例如"小型服务器场的单一服务器或Web服务器"。接着,要启动Windows SharePoint Services搜索服务,并提供必要的账户和数据库信息。然后,启动Project应用程序服务。在配置完成后,确保所有必需的服务都已经启动。
接下来,需要在应用程序管理选项卡中创建或配置共享服务。这涉及到创建新的Web应用程序,并填写相关的应用程序信息,如URL、托管账户和数据库信息。在完成这些步骤后,系统会进行共享服务的配置,要求输入额外的配置信息,如服务器场的详细设置。一旦所有配置都成功执行,系统会显示一个成功的提示界面,表明共享服务已成功配置。
在整个配置过程中,特别需要注意的是账户的安全性和权限设置,以及数据库连接的正确性,因为这些是Project Server 2007正常运行的关键。同时,正确配置Web应用程序的设置对于确保Project Professional 2007能够与Project Server 2007无缝集成也至关重要。
此外,理解每个阶段的目标和任务对于后续的维护和问题排查非常有帮助。例如,如果在项目管理中遇到问题,可能需要回溯到配置步骤来检查是否所有的服务都已启动,或者共享服务配置是否正确。因此,这个详细的配置指南不仅是安装Project Server 2007时的重要参考,也是解决可能出现问题的宝贵资源。
Jimmy Experience Series
4 / 16
填写完成,点击“开始”按钮。
配置完成后回到以下界面,点击“Project 应用程序服务”后面的“启动”链接。
剩余15页未读,继续阅读
2023-07-17 上传
2023-07-14 上传
2021-07-09 上传
2010-01-12 上传
2022-09-19 上传
2023-06-10 上传
2023-02-22 上传

sf_promise
- 粉丝: 4
- 资源: 76
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
