QMC5883L高精度三轴磁传感器datasheet:小体积,大应用
需积分: 9 177 浏览量
更新于2024-07-16
收藏 1023KB PDF 举报
VTran QMC5883L是一款专为高精度应用设计的地磁传感器芯片,其核心特性体现在以下几个方面:
1. 多轴磁敏感器集成:QMC5883L作为一个三轴磁传感器,它将三个独立的磁敏感元件集成在一个小型的表面贴装(Surface Mount Technology, SMT)芯片上。这使得它在紧凑的空间内提供全面的磁场检测能力。
2. 信号处理与模拟前端:芯片内部集成了先进的信号条件处理应用集成电路(ASIC),能够有效过滤噪声,提高测量精度。这使得QMC5883L特别适合对方位感知(如指南针)、导航和游戏等高精度应用,尤其在无人机、机器人、移动设备和个人手持设备中表现出色。
3. 高性能技术基础:该产品基于 Honeywell AMR 技术的高分辨率磁电阻技术,确保了极高的灵敏度和准确性。低功耗设计使得它在长时间运行中也能保持稳定性能。
4. 精准度与特性:QMC5883L能够实现1°到2°的磁场方向(或称为磁航向)测量精度,这对于需要精确导向的应用来说是至关重要的。它还具备温度补偿功能,确保在宽温范围内(-40°C至+85°C)都能稳定工作。
5. I²C接口:通过I²C(Inter-Integrated Circuit)串行总线接口,QMC5883L提供了简单易用的通信方式,便于与主控制器和其他外部设备进行数据交换。
6. 封装形式:该芯片采用3x3x0.9毫米的3D LGA(Land Grid Array)封装,占用空间小,有利于高度集成的电子产品设计。
7. 广泛应用领域:QMC5883L广泛应用于移动电话、上网本、消费电子、汽车导航系统和个人导航设备等众多领域,满足不同场景下的精确定位需求。
VTran QMC5883L是一款功能强大、体积小巧且具有出色性能的地磁传感器,是现代电子设备中实现高精度磁场感知的理想选择。
4 / 20
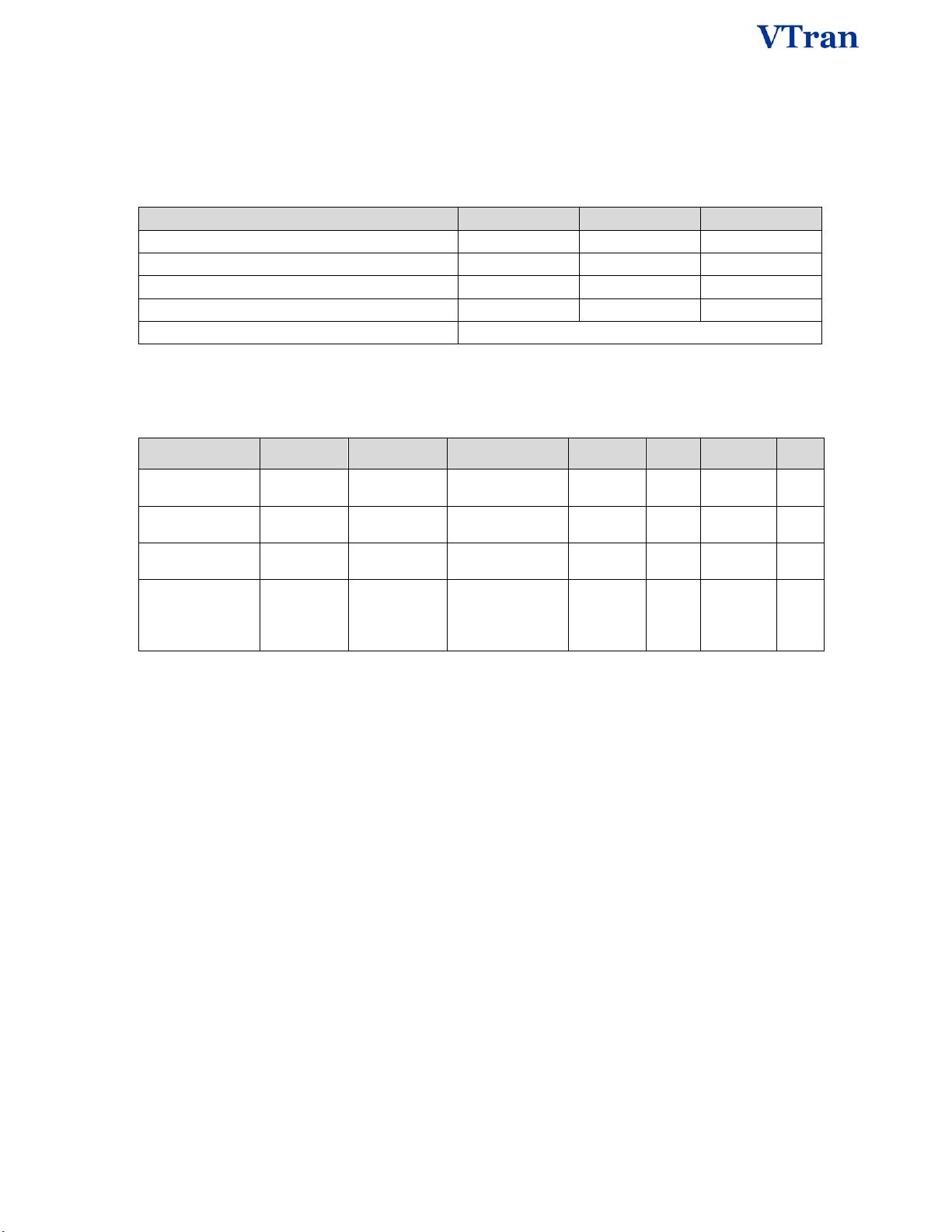
2.2 Absolute Maximum Ratings
Table 3. Absolute Maximum Ratings (Tested at 25°C except stated otherwise.)
Parameter
MIN.
MAX.
Units
VDDIO
-0.3
5.4
V
VDD
-0.3
5.4
V
Storage Temperature
-40
125
C
Exposed to Magnetic Field (all directions)
50000
Gauss
Reflow Classification
MSL 3, 260C Peak Temperature
2.3 I/O Characteristics
Table 4. I/O Characteristics
Parameter
Symbol
Pin
Condition
Min.
TYP.
Max.
Unit
Voltage Input
High Level 1
V
IH
1
SDA, SCL
0.7*VD
DIO
VDDIO+
0.3
V
Voltage Input
Low Level 1
V
IL
1
SDA, SCL
-0.3
0.3*VD
DIO
V
Voltage Output
High Level
V
OH
INT
Output Current
≥-100uA
0.8*VD
DIO
V
Voltage Output
Low Level
V
OL
INT, SDA
Output Current
≤100uA(INT)
Output Current
≤1mA (SDA)
0.2*VD
DIO
V
剩余19页未读,继续阅读
1150 浏览量
2024-04-24 上传
点击了解资源详情
5894 浏览量
1092 浏览量

玖6五4
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多技术领域源码集锦:园林绿化官网企业项目
- 定制特色井字游戏Tic Tac Toe开源发布
- TechNowHorse:Python 3编写的跨平台RAT生成器
- VB.NET实现程序自动更新的模块设计与应用
- ImportREC:强大输入表修复工具的介绍
- 高效处理文件名后缀:脚本批量添加与移除教程
- 乐phone 3GW100体验版ROM深度解析与优化
- Rust打造的cursive_table_view终端UI组件
- 安装Oracle必备组件libaio-devel-0.3.105-2下载
- 探索认知语言连接AI的开源实践
- 微软SAPI5.4实现的TTSApp语音合成软件教程
- 双侧布局日历与时间显示技术解析
- Vue与Echarts结合实现H5数据可视化
- KataSuperHeroesKotlin:提升Android开发者的Kotlin UI测试技能
- 正方安卓成绩查询系统:轻松获取课程与成绩
- 微信小程序在保险行业的应用设计与开发资源包
