INPHO MATCH-AT空三加密软件操作详解
"INPHO MATCH-AT空三加密软件操作手册.pdf"
INPHO MATCH-AT是一款专业用于航空摄影测量中的空三加密处理的软件,由北京超图软件股份有限公司于2012年发布。该软件主要用于处理遥感影像,实现精确的三维地理空间信息提取。本手册详细介绍了软件的各项操作流程。
1. 启动“ApplicationsMaster”
用户需在安装目录下找到并点击"ApplicationsMaster"的图标来启动程序。如需更多详细信息,可查阅参考手册。
2. 打开项目
若已有项目文件存在,可通过点击"打开"按钮加载项目。若项目是新创建的,程序会自动加载。若不想创建新项目,可直接打开预设的"project_prepared.prj"项目文件。
3. 新建项目/项目生成器
创建新项目时,会弹出项目编辑器的基本对话框,用户需逐项输入项目所需数据,包括设置日志文件名、选择坐标单位、勾选地球曲率和大气折射校正、添加项目描述等。此外,操作者信息默认为计算机名,坐标系统可选择为局部坐标。
4. 相机编辑器
相机编辑器用于管理与编辑相机参数。用户可以新建相机,导入已存在的相机定义,或从旧版INPHO相机文件导入。建议保存所有相机参数至通用的INPHO项目文件,以便在不同项目间复用。
5. 导入相机定义
在相机编辑器中选择"导入"功能,选择要导入的文件格式,如Inpho相机文件(4.0或更早版本)或Inpho项目文件(5.0),然后选取示例相机文件"sample_cameras.prj"进行导入,并指定要导入的特定相机。
6. 影像金字塔
影像金字塔是提高软件处理速度和显示性能的技术,通过构建多级缩略图,快速访问不同分辨率的影像。
7. 控制点量测
在进行空中三角测量前,需要测量控制点,以确保影像匹配的准确性。控制点可以是地面已知位置的点,通过它们可以校正和关联不同影像。
8. 空中三角测量
空中三角测量(空三)是计算相机内外参数和地形点三维坐标的过程。MATCH-AT软件通过匹配特征点,自动计算这些参数,建立影像与地表之间的几何关系。
9. photomeasuretool中查看空三结果
利用photomeasuretool工具,用户可以检查空中三角测量的结果,验证点云和影像的匹配质量。
10. 后处理(最终空中三角测量)
后处理阶段是对空三结果进行优化,可能包括点云的精细化处理,剔除错误匹配点,以及进一步调整参数以提高精度。
11. 抽稀点
在得到高密度的点云后,通常需要进行抽稀处理,减少点的数量,生成更简洁的数字高程模型(DEM)或数字表面模型(DSM),同时保持足够的细节。
通过上述步骤,用户可以全面掌握INPHO MATCH-AT软件的使用,高效地完成航空摄影测量的空三加密任务。在实际工作中,根据项目需求,可能还需要对软件的其他高级功能进行深入学习和实践。
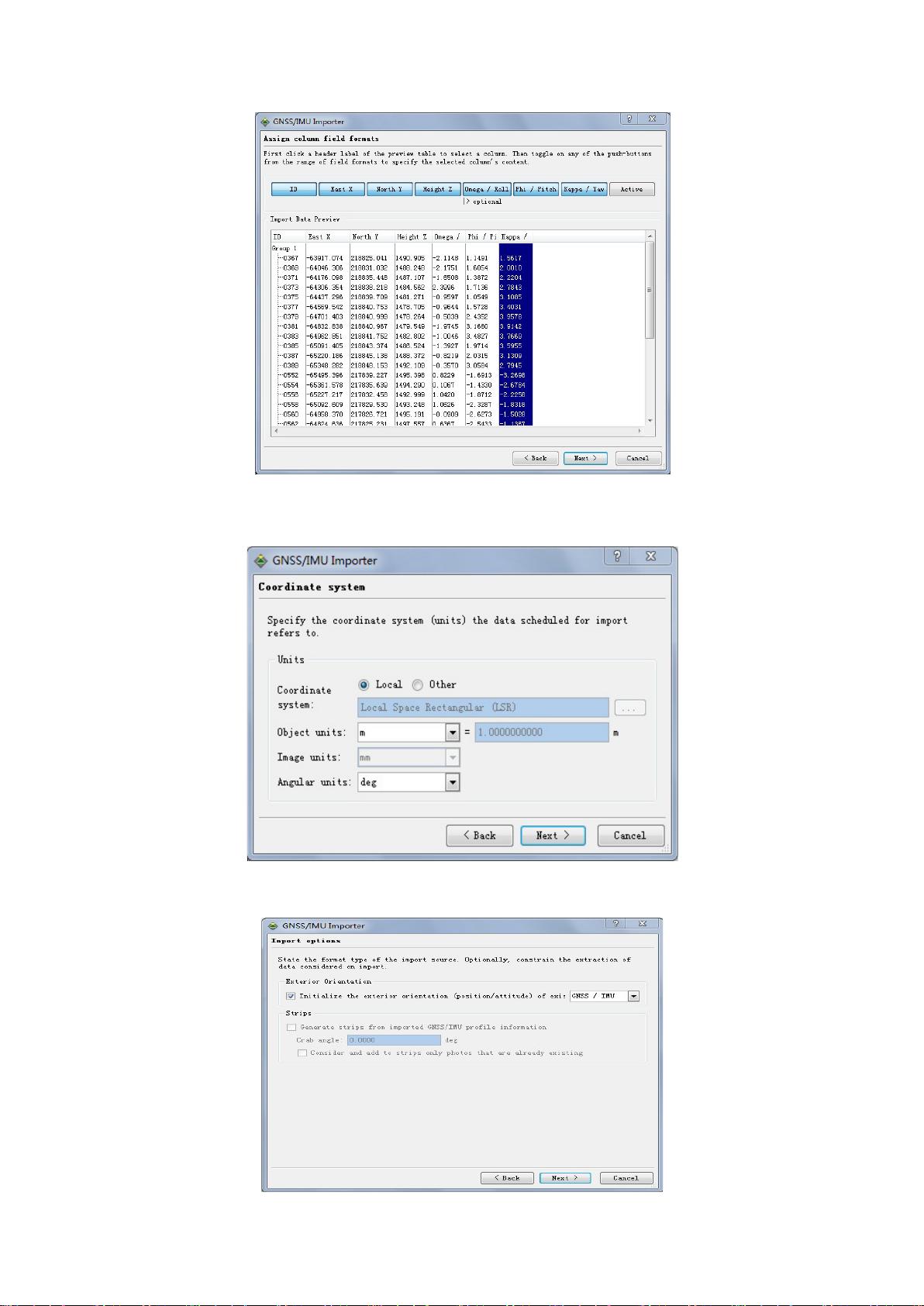
下一步,设置 GNSS 的识别符提取。
下一步,确认坐标系统和单位,如果这里的坐标类型和项目单位与创建的
项目不同,会做自动的转换。
下一步进入航带生成和外方位元素初始化界面,可以通过加载的
GNSS/IMU 进行航带的自动生成和外方位元素初始化。

剩余38页未读,继续阅读
相关推荐




dlhqxjbq
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 简易脚本集成英特尔MKL到Debian/Ubuntu系统
- 2018美团点评技术创新分享(中篇)
- Spring框架问卷调查系统源代码免费下载
- 易语言实现网易163邮箱登录器教程
- 深入解析新浪微博安卓客户端源码架构
- Cocos2d-x粒子编辑器源码深入解析
- RU.exe与RU.EFI:跨平台的Bios修改工具
- Qt实现OBD II数字仪表集群开发指南
- 基于Hugo框架的TECv2加密纲要开发
- 淘宝商品排名优化技巧与查询工具
- Linux桌面弹出菜单快速输入Emoji与Kaomoji技巧
- SAPJCO3 Jar包环境配置及部署指南
- C语言编写的《智能算法》源代码解析
- MFC列表控件CListCtrl的自绘实现及表头绘制
- coc-phpls: 为PHP打造的高效语言服务器扩展
- Linux promptless:极致快速的极简Shell提示符实现
