Inpho5.7空三加密技术详解与操作步骤
需积分: 31 138 浏览量
更新于2024-07-20
收藏 17.51MB DOCX 举报
"空中三角测量(空三加密)技术在Inpho 5.7软件中的操作流程"
空中三角测量,简称“空三”,是摄影测量领域的重要环节,它利用航测内业方法来确定像片的精确外方位元素以及地面点的三维坐标。Inpho作为主流的航空摄影测量软件,为空三加密提供了强大支持,尤其适用于处理大飞机和无人机的数据。
在进行空三加密前,必须做好充分的数据准备。首先,相机检校是关键,需要获取相机的焦距、像元大小、主点偏移等相关参数。接着是航片数据,通常要求为无损的Tif格式,因为Jpg压缩会丢失信息,影响匹配精度。此外,还需要粗略的外方位元素,包括大地平面坐标、姿态角等,误差应控制在一定范围内。地面控制点数据也是必不可少的,用于提高加密的精度。
硬件配置方面,例如使用联想四核3.20GHz的台式机和4GB内存,可以满足基本的空三计算需求。实际工作中可能需要更高的配置以应对大数据量和复杂任务。
技术路线通常包括数据预处理、空三加密等多个步骤。在Inpho软件中,数据预处理涉及对原始航片的质量检查、POS数据整理、畸变校正和控制点数据的处理。如需畸变校正,可利用Matrax软件,根据相机文件中的参数进行操作。
空三过程开始于工程的建立,需要编辑相机参数,如焦距、框幅、分辨率等,并添加航片。在添加航片时,应设定合适的地形高度,且通常不使用GNSS方位进行初始化。接着,导入POS数据,根据其内容选择相应类别,并设置标准差。控制点数据的添加与POS类似。最后,选择工程保存路径,并根据实际情况调整参数,如影像匹配策略、控制点的使用等。
空三加密完成后,软件将通过区域整体平差算法解算出所有加密点的坐标和像片的方位元素。此过程不仅涉及到数学模型的应用,也依赖于优化算法的选择。最终结果可用于生成数字高程模型(DEM)、数字正射影像图(DOM)等产品,服务于测绘、地理信息系统(GIS)以及城市建设等多个领域。
空三加密在Inpho 5.7中的操作流程是一个综合了数据处理、几何建模和优化计算的复杂过程,需要对软件功能有深入理解和实践经验,才能确保空三加密的准确性和效率。
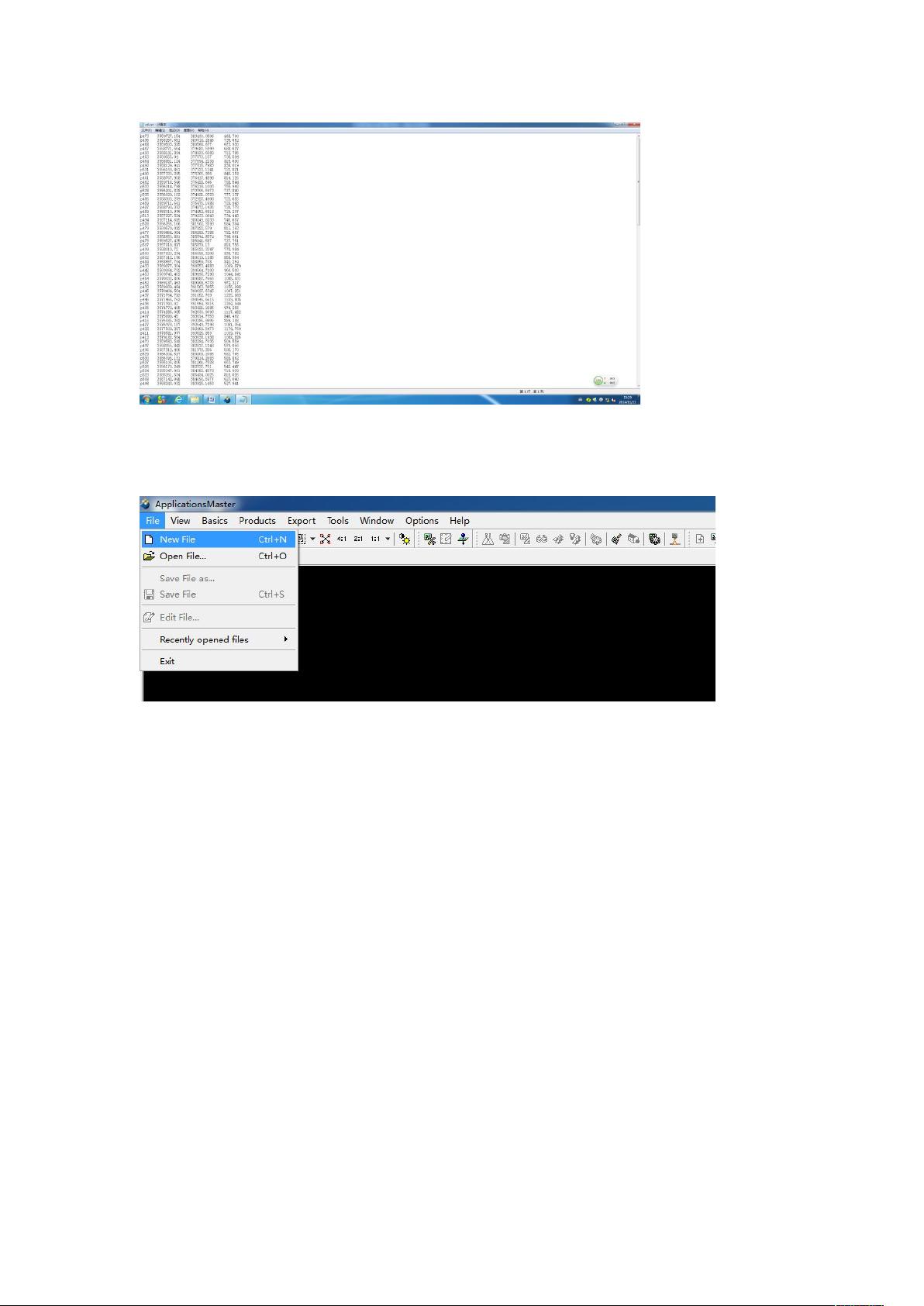
2、空三过程
(1)工程建立
①相机编辑
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
341 浏览量
2018-08-27 上传
2015-10-17 上传

国王杯
- 粉丝: 21
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







