镭神智能C32系列32线激光雷达使用及通讯协议指南
需积分: 0 197 浏览量
更新于2024-06-30
1
收藏 4.28MB PDF 举报
"镭神智能C32系列32线机械式激光雷达使用说明书V2.7_客户版202011231"
本文档是镭神智能C32系列32线机械式激光雷达的使用说明书,详细介绍了雷达的工作原理、规格参数、电气接口、连接方法以及通讯协议等内容,旨在帮助用户正确操作和理解该款激光雷达的功能与性能。
1. 雷达介绍
镭神智能C32系列是一款32线机械式激光雷达,它采用了先进的激光测距技术,能够提供高分辨率的三维点云数据。产品主要由雷达本体、电源和电气接口等部分组成,适用于自动驾驶、机器人导航、环境感知等多种应用场景。
1.1 说明
此部分对雷达的基本信息进行了简要介绍,包括雷达的特性和使用注意事项。
1.2 工作原理
镭神智能C32系列激光雷达通过发射激光脉冲并接收反射回的信号来测量目标的距离。根据时间飞行原理(TOF),计算出光脉冲往返的时间,从而得出目标距离。同时,通过旋转镜片实现水平方向的扫描,获取多个角度的数据,形成3D点云图像。
1.3 产品描述
产品描述部分详细列出了雷达的具体特性,如线数、扫描速度、探测距离等,并给出了雷达的外形尺寸图,以便用户了解其物理结构。
2. 产品规格
这部分包含了雷达的规格参数,如测距范围、分辨率、扫描频率等,以及外形尺寸图,帮助用户在实际应用中考虑安装和空间需求。
3. 电气接口
详细介绍了雷达的电源要求和电气接口类型,包括电源连接方式和接口定义,为用户正确连接电源和通信提供了指导。
4. 快速指南
这部分指导用户如何连接雷达,以及如何在Windows环境下使用配套软件显示点云数据和配置雷达参数。还介绍了如何解析点云数据,便于进行后续的数据处理和分析。
5. 通讯协议
文档详细阐述了雷达的通讯协议,包括数据包协议、设备包协议和配置包协议,以及各个参数的含义和设置方法。这些协议用于控制雷达的运行模式、获取扫描数据以及进行设备配置。
6. 时间同步
时间同步部分讨论了雷达如何与GPS、NTP服务器或外部设备进行时间同步,确保数据的时间精度,对于实时应用尤为重要。
7. 点云数据的计算
7.1至7.4详细介绍了如何计算点云数据的垂直角度、水平角度、距离值以及转换为笛卡尔坐标系的方法,为用户理解和处理雷达输出的数据提供了理论基础。
8. 点云数据的精确时间计算
这部分介绍了如何计算点云数据的精确时间,包括数据包结束时间和通道数据的精确时间,这对于处理连续的点云流至关重要。
9. 附录
附录A提供了点云显示软件的相关信息,包括软件的适用范围、安装步骤和主要功能,方便用户进行数据可视化和分析。
总结来说,这份使用说明书全面地涵盖了镭神智能C32系列32线机械式激光雷达的各个方面,为用户提供了详尽的操作指导和技术支持,确保用户能有效地利用这款高性能的激光雷达设备。

深圳市镭神智能系统有限公司
Leishen Intelligent System Co.,LTD.
2020-11-04 10/58页
4 快速指南
4.1 连接激光雷达
图 4.1 连接雷达和电脑
4.2 Windows 软件显示点云和配置雷达
随雷达附送的点云显示软件解析数据包和设备包信息,显示 3D 点云数据,通过可视化界
面,用户可以重置雷达参数。具体操作流程见附录点云显示软件章节。
雷达网络参数缺省的 IP 和端口号如下表:
表 4.1 雷达默认网络配置
IP 地址
UDP 设备包端口号
UDP 数据包端口号
雷达
192.168.1.200
2368(固定不可配)
2369(固定不可配)
电脑
192.168.1.102
2369
2368
注意:1.设置雷达 IP 时,本地 IP 与目的 IP 不能设置为同一 IP,否则雷达将不能正常工作。
2.雷达组播模式时,两个目的端口禁止设置为同一个端口号。
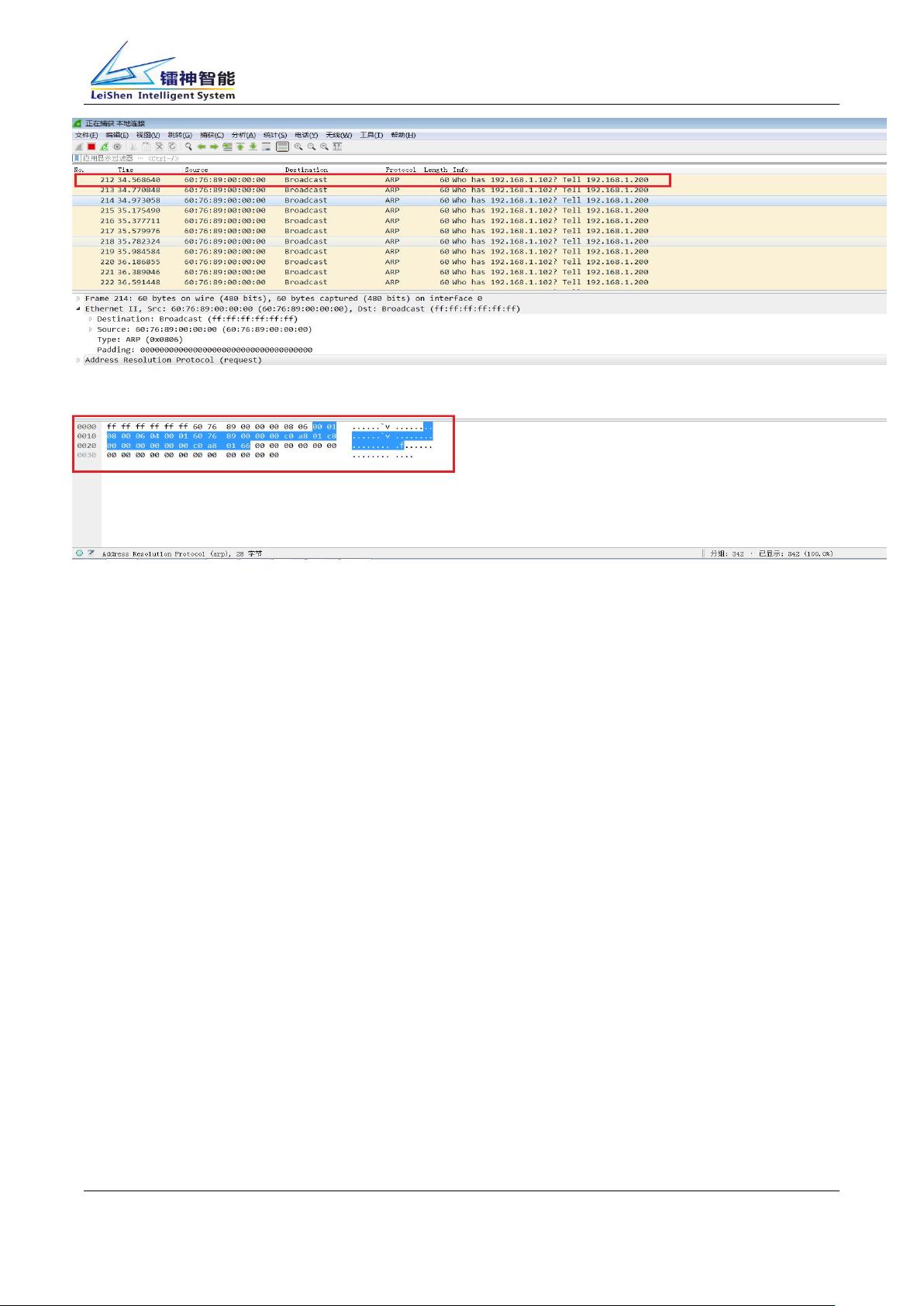
连接雷达时,电脑与雷达的 IP 在不同网段时,需要设置网关;相同网段时,设置不同 IP
即可,例如:192.168.1.x,子网掩码为 255.255.255.0。若需查找雷达的以太网配置信息,连接
雷达后电脑可以使用 Wireshark 软件抓取设备 ARP 包进行分析,有关 ARP 包的特征识别,见下
图。

剩余57页未读,继续阅读
1055 浏览量
228 浏览量
2023-06-19 上传
2021-03-13 上传
2021-02-24 上传
1436 浏览量

宏馨
- 粉丝: 27
- 资源: 293
 我的内容管理
展开
我的内容管理
展开







