ISO11898-2:高速CAN物理层与MAU一致性测试详解
ISO11898-2中文版是关于道路车辆通信系统中高速CAN介质访问层的标准,它定义了在高达1Mbps速度下运行的介质访问单元(MAU)及其与物理层相关的特性。该标准适用于分布式实时控制和多路复用应用场景,如汽车电子系统中的控制器区域网络(CAN)通信。
标准的范围包括对CAN物理层的详细规范,确保在高数据传输速率下系统的可靠性和一致性。它参考了ISO7637-3、ISO/IEC8802-3以及ISO16845等文档,这些文档分别涉及电气干扰、局域网技术以及CAN一致性测试,共同为CAN通信环境提供了全面的支持。
术语和定义部分是理解标准的关键,例如:
- **总线电压**(VCAN_L和VCAN_H):定义每个CAN节点的总线电压极性。
- **共模总线电压范围**:确保在满节点情况下,总线电压保持在可通信的范围内。
- **差分内部电容(Cdiff)**:CAN节点接收状态下,CAN_L和CAN_H之间的电容。
- **差分内部电阻(Rdiff)**:相同状态下,CAN_L和CAN_H之间的电阻。
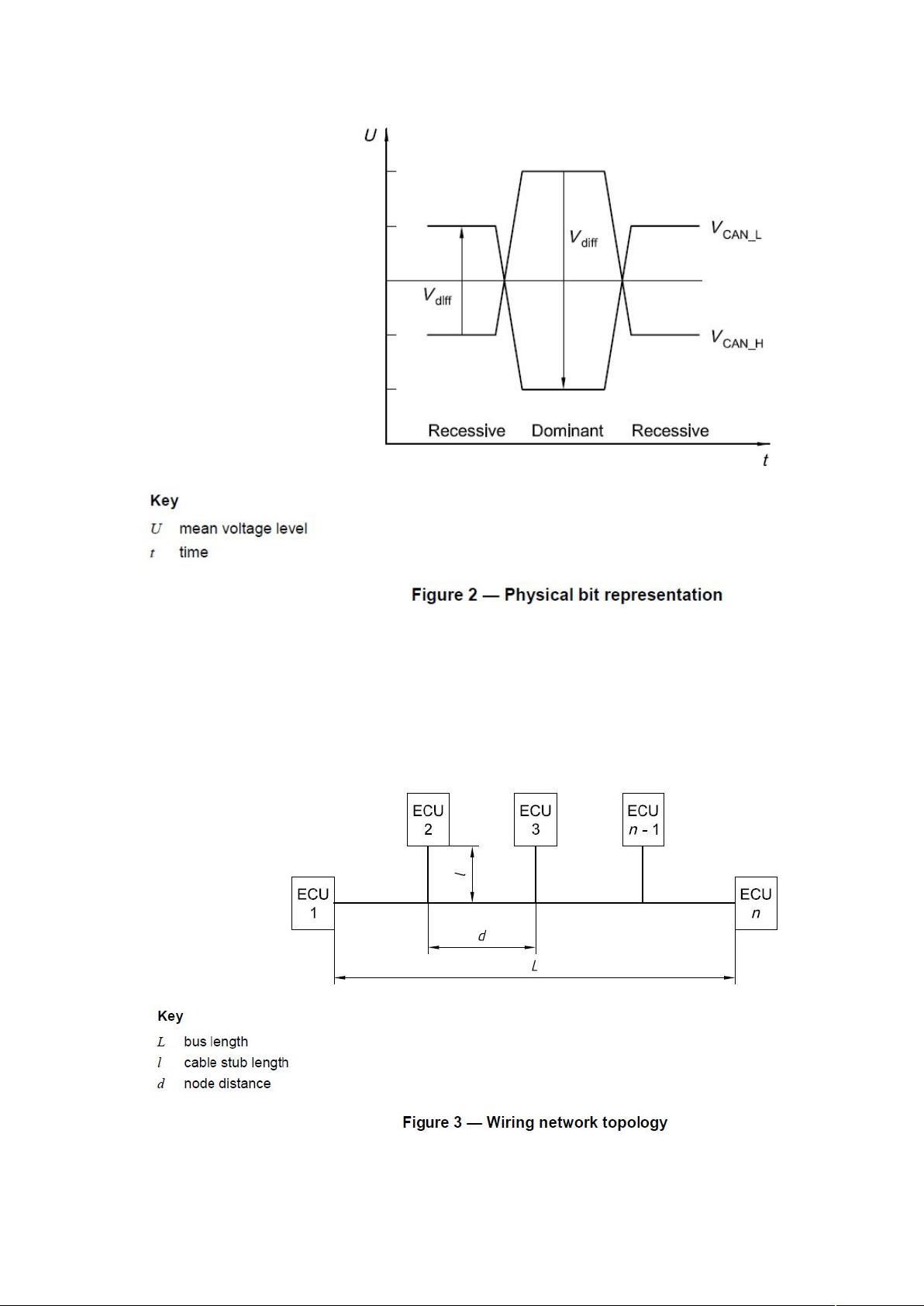
- **差分电压(Vdiff)**:测量CAN总线的信号差值。
- **内部电容(Cin)**:CAN节点与地之间的电容,影响信号完整性。
- **内部延时(tnode)**:节点从总线断开后,发送和接收路径上异步延迟的总和。
- **内部电阻(Rin)**:节点与地之间的电阻。
- **物理层**:负责CAN节点与总线电气连接的电路,包括模拟和数字电路,作为模拟信号与数字信号的接口。
该标准还强调了对节点总数的考虑,因为节点总数会影响总线的电气性能和通信质量。通过遵循ISO11898-2,制造商可以确保其设计的CAN网络在道路车辆环境中能够稳定、高效地运行,同时满足电气兼容性和抗干扰的要求。在实际应用中,工程师需要熟悉并遵循这些规定,以保证CAN通信系统的整体性能和安全性。
5.3 介质依赖接口说明
在总线上加入 CAN 接的的接插件应满足电气说明定义的需求,这个规定目的是平衡最重要
的电气参数并且不定义机械和材料参数。
5.4 物理介质说明
CAN 网络线束拓扑应尽量接近单根线的结构,目的是避免线束反射波。实际上,图 3 的短
接线是连接 CAN 节点到总线成功必须的。
剩余17页未读,继续阅读
760 浏览量
243 浏览量
134 浏览量
424 浏览量
250 浏览量
2048 浏览量

gmy800101
- 粉丝: 3
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- e_shop.rar
- springboot整合mybatis+quartz实现任务持久化
- 弦乐
- DDNS_Updater:Windows Update for DDNS he.net
- TS3MusicBot WebStream (TeamSpeak & Discord)-crx插件
- 2014年春节拜年短信下载
- java版ss源码-elastic-job-spring-boot-starter:Elastic-JobSpringBoot自动集成,只需要
- 计分器项目打包软件.rar
- pyenvelope:Pyenvelope可帮助您找到一组点的任意定向的最小边界矩形。 最小边界矩形(MBR),也称为边界框或信封
- Udacity_DS_and_Algo:Udacity的数据结构和算法纳米程序
- spin.it.js
- 怎样组建标杆学习团队
- 聪明的报价
- Many Pins Lite-crx插件
- java版ss源码-hive-jdbc-uber-jar:基于最新ApacheHive版本的HiveJDBC“uber”或“独立”jar
- 取Excel表格有数据单元格的起讫行、列.e.rar
