杭电智能车竞赛技术报告:基于MK66FX1M0VLQ18的控制系统
需积分: 18 59 浏览量
更新于2024-07-14
5
收藏 1.7MB PDF 举报
"这篇技术报告来自杭州电子科技大学的杭电竞速一队,参与了第十五届全国大学生智能汽车竞赛。报告详细介绍了他们在比赛中使用的智能车技术,包括硬件平台(基于MK66FX1M0VLQ18单片机的K66环境)、软件平台(Keil开发环境)以及摄像头和传感器的应用。团队通过数字CMOS摄像头捕捉赛道信息,利用PID控制算法优化电机控制,确保车辆稳定快速行驶。此外,他们还改进了上届的上位机程序,使用C#编写调试工具,提升了调车效率。"
在此次全国大学生智能汽车竞赛中,杭州电子科技大学的杭电竞速一队展示了一种基于先进技术和创新设计的智能车解决方案。该车的核心硬件平台选用了恩智浦(NXP)的MK66FX1M0VLQ18单片机,这是一个高性能的微控制器,为智能车的复杂运算提供了强大的计算能力。软件开发环境则是Keil,这是一个广泛用于嵌入式系统开发的集成开发环境,支持高效代码编写和调试。
智能车的关键组成部分之一是数字CMOS摄像头,它负责实时捕获赛道信息。这些信息随后被传输到单片机的输入/输出(IO)接口,经过单片机的分析处理,通过PID(比例-积分-微分)控制算法,确定最佳行驶路径,进而精确控制电机,使车辆在赛道上保持稳定且快速的行驶状态。
团队在软件设计上进行了多方案比较,以提升车辆运行的稳定性和速度。他们引入了SD卡技术,实现实时存储赛道信息,这不仅有利于故障排查,还能辅助分析优化控制策略。硬件层面,尽管沿用了之前验证过的稳定方案,但对电源部分进行了改进,增大了电源裕度,增强了硬件系统的鲁棒性。此外,团队还开发了一个新的C#上位机程序,以替代和改进原有的调试工具,显著提高了调车效率和精度。
关键词涵盖的领域包括恩智浦智能车技术、MK66FX1M0VLQ18单片机、CMOS摄像头、PID控制、存储器以及C#上位机开发,展示了该校学生在智能车设计和控制算法方面的深入理解和实践能力。通过这份技术报告,我们可以看到杭州电子科技大学在智能汽车竞赛中的创新实践和对技术的深刻理解。
第十五届全国大学生智能汽车邀请赛技术报告
5
5) 运用 OLED 屏幕、组合按键进行参数调整。
第二章 机械系统设计与实现
2.1 前轮定位
前轮定位对赛车的速度有很大的影响,虽然车模比较小,但是前轮定位作
用还是不容忽视的。轮定位的内容有:主销后倾、主销内倾、前轮前束。
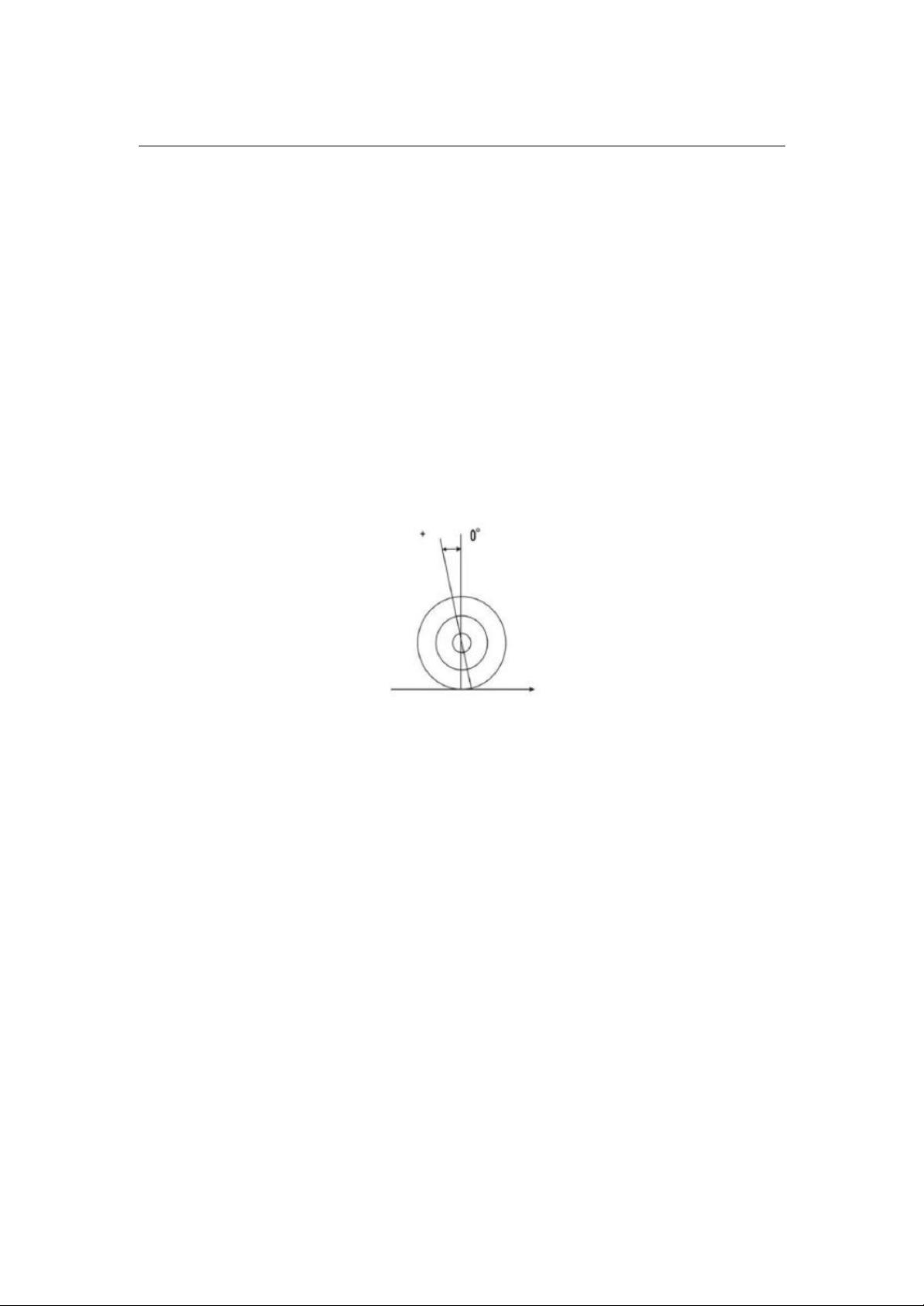
2.1.1 主销后倾
转向轮(前轮)围绕主销进行旋转,前轴的轴荷通过主销传给转向轮,具备这
两点的就叫做主销。主销向后倾斜,主销轴线与地面垂直线在赛车纵向平面内的夹
角称为主销后倾。如图所示:
图2.1.1
前轮重心在主销的轴线上,由于主销向后倾斜使前轮的重心不在车轮与地面的
接触点上,于是产生了离心力,主销后倾形成的离心力,可以保证汽车直线行驶的
稳定性,还可以帮助车轮自动回正。
2.1.2 主销内倾
主销在横向平面内向内倾斜,主销轴线与地面垂直线在赛车横向断面内的
夹角称为主销内倾角。主销内倾角也有使轮胎自动回正的作用,当汽车转向轮
在外力作用下发生偏转时,由于主销内倾,则车轮连同整个汽车的前部将被抬
起一定高度,在外力消失后,车轮就会在重力作用下力图恢复到原来的中间位
置。但主销内倾角不宜过大,否则在转弯时轮胎将与赛道间产生较大的滑动,
从而会增加轮胎与路面间的摩擦阻力,使转向变得沉重,同时会加速轮胎的磨
损。经过反复的试验,我们大约主销内倾了 3°。
2.1.3 前轮前束
通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角,
称为前轮外倾角。前轮外倾角是前轮的上端向外倾斜的角度,如果前面两个轮
子呈现“V”字形则称正倾角,呈现“八”字则称负倾角。前轮外倾可以抵消由于车
的重力使车轮向内倾斜的趋势,减少赛车机件的磨损与负重。前轮前束是前轮

剩余46页未读,继续阅读
2023-08-23 上传
2024-09-21 上传
2021-08-31 上传
2024-01-20 上传
2024-01-24 上传
2024-10-17 上传

叫我磊就好
- 粉丝: 2
- 资源: 75
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
