"移动机器人定位研究手册:路标和信标等方法"
需积分: 5 52 浏览量
更新于2024-04-02
收藏 12.21MB PDF 举报
This manual, "Where am I? Sensors and Methods for Mobile Robot Positioning," is a comprehensive guide to the early research on localization in mobile robots. It covers various methods such as landmarks, beacons, and other techniques used for positioning. The authors, J. Borenstein, H. R. Everett, and L. Feng, along with contributing authors S. W. Lee and R. H. Byrne, provide detailed information on how sensors and algorithms can be utilized to accurately determine the location of a mobile robot. This manual, prepared by the University of Michigan for the Oak Ridge National Lab (ORNL), serves as a valuable resource for researchers and engineers working in the field of robotics. Overall, it offers a thorough overview of the strategies and technologies available for mobile robot localization, making it an essential reference for anyone interested in this area of study.
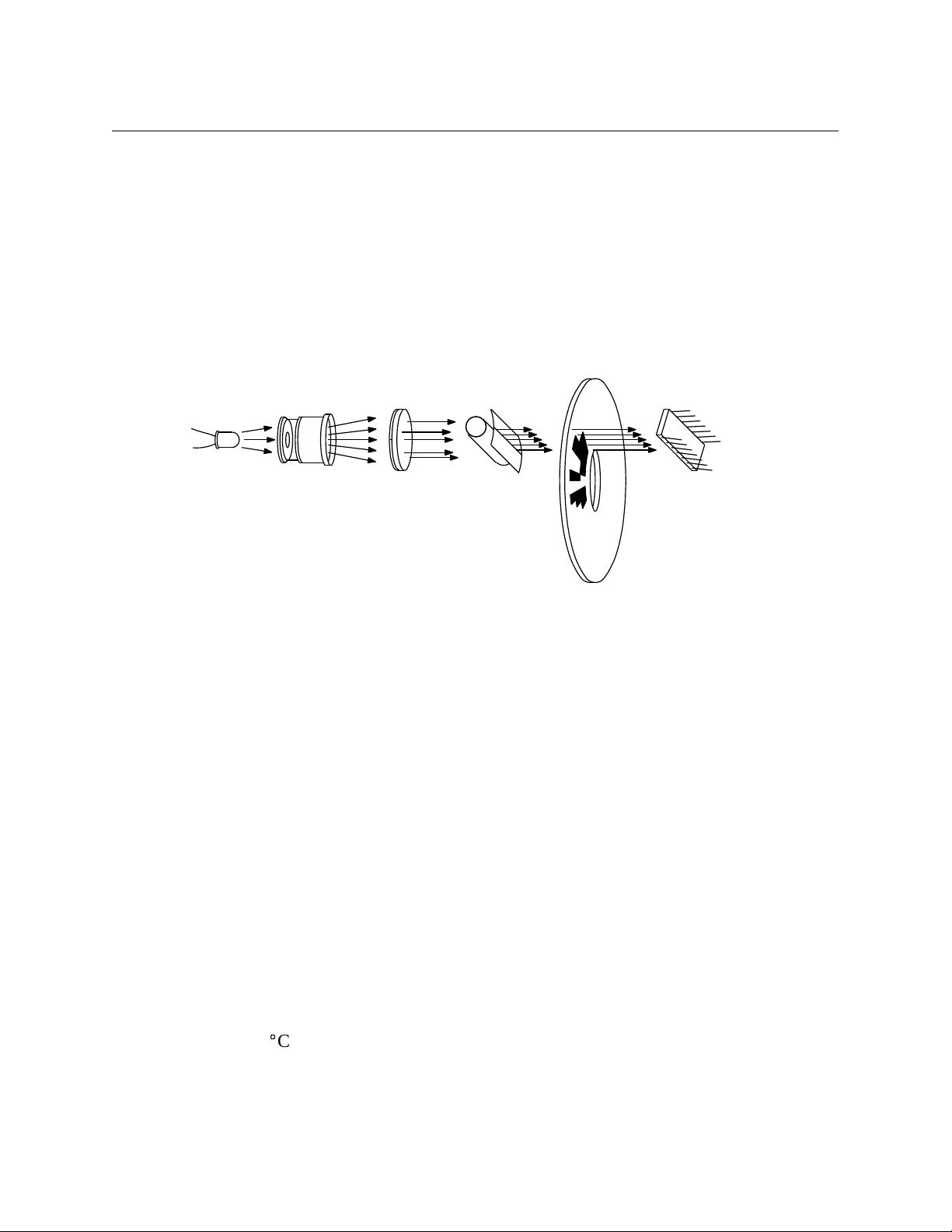
Collimating
lens
Multi-track
encoder
Detector
array
Beamsource
expander
LED
Cylindrical
lens
disk
16 Part I Sensors for Mobile Robot Positioning
Figure 1.2:
A line source of light passing through a coded pattern of opaque and
transparent segments on the rotating encoder disk results in a parallel output that
uniquely specifies the absolute angular position of the shaft. (Adapted from [Agent,
1991].)
1.1.2 Absolute Optical Encoders
Absolute encoders are typically used for slower rotational applications that require positional
information when potential loss of reference from power interruption cannot be tolerated. Discrete
detector elements in a photovoltaic array are individually aligned in break-beam fashion with
concentric encoder tracks as shown in Figure 1.2, creating in effect a non-contact implementation
of a commutating brush encoder. The assignment of a dedicated track for each bit of resolution
results in larger size disks (relative to incremental designs), with a corresponding decrease in shock
and vibration tolerance. A general rule of thumb is that each additional encoder track doubles the
resolution but quadruples the cost [Agent, 1991].
Instead of the serial bit streams of incremental designs, absolute optical encoders provide a
parallel word output with a unique code pattern for each quantized shaft position. The most common
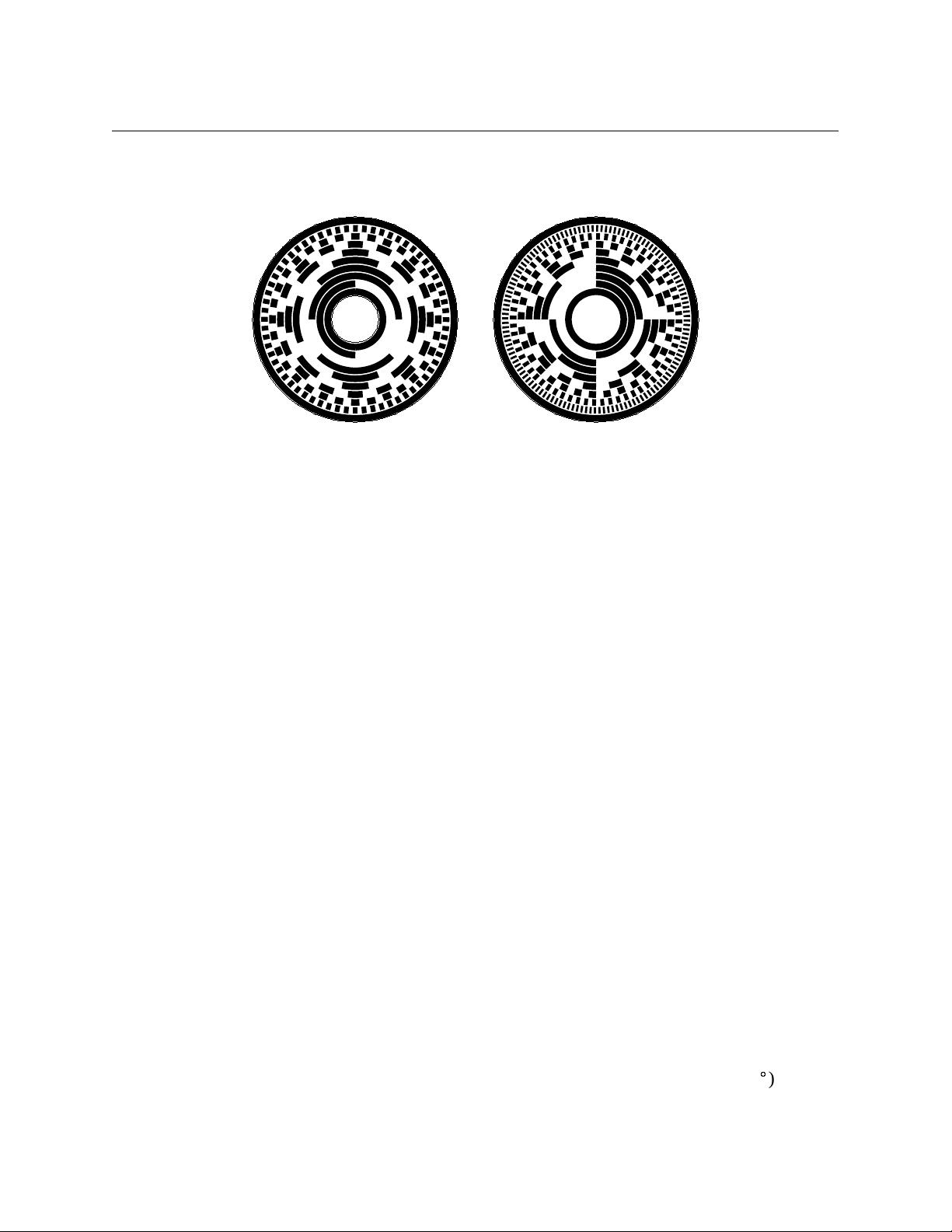
coding schemes are Gray code, natural binary, and binary-coded decimal [Avolio, 1993]. The Gray
code (for inventor Frank Gray of Bell Labs) is characterized by the fact that only one bit changes
at a time, a decided advantage in eliminating asynchronous ambiguities caused by electronic and
mechanical component tolerances (see Figure 1.3a). Binary code, on the other hand, routinely
involves multiple bit changes when incrementing or decrementing the count by one. For example,
when going from position 255 to position 0 in Figure 1.3b, eight bits toggle from 1s to 0s. Since there
is no guarantee all threshold detectors monitoring the detector elements tracking each bit will toggle
at the same precise instant, considerable ambiguity can exist during state transition with a coding
scheme of this form. Some type of handshake line signaling valid data available would be required
if more than one bit were allowed to change between consecutive encoder positions.
Absolute encoders are best suited for slow and/or infrequent rotations such as steering angle
encoding, as opposed to measuring high-speed continuous (i.e., drive wheel) rotations as would be
required for calculating displacement along the path of travel. Although not quite as robust as
resolvers for high-temperature, high-shock applications, absolute encoders can operate at
temperatures over 125
(
C, and medium-resolution (1000 counts per revolution) metal or Mylar disk
designs can compete favorably with resolvers in terms of shock resistance [Manolis, 1993].
A potential disadvantage of absolute encoders is their parallel data output, which requires a more
complex interface due to the large number of electrical leads. A 13-bit absolute encoder using

剩余281页未读,继续阅读
2011-05-05 上传
2009-02-13 上传
2011-03-22 上传
106 浏览量
2021-08-14 上传
2019-10-24 上传
2021-09-26 上传
2022-05-16 上传

Robot-G
- 粉丝: 514
- 资源: 72
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
