ADAMS-MATLAB联合仿真:主动悬架控制策略优化研究
版权申诉
30 浏览量
更新于2024-06-19
收藏 2.38MB PDF 举报
该篇毕业论文主要探讨了如何运用ADAMS(Automotive Dynamic Analysis System)和MATLAB联合仿真技术来改进主动悬架的控制策略。主动悬架作为一种先进的汽车悬挂系统,通过实时调整来提高车辆行驶的平稳性和安全性,传统被动悬架由于其固有的刚度和阻尼不可变,难以满足各种路况下的理想性能。
论文首先阐述了悬架在车辆性能中的核心作用,指出被动悬架在应对复杂路况时的局限性。为了克服这一问题,作者选择了主动悬架作为研究对象,它能够根据路面状况动态调整,以优化驾驶体验。
作者采用ADAMS软件构建了一个七自由度的主动悬架整车模型和随机路面模型,这种方法避免了建立复杂非线性数学模型的困难。同时,利用PID(Proportional-Integral-Derivative)控制原理和模糊控制理论,设计了主动悬架的PID控制器和Fuzzy-PID控制器。这些控制器的性能评价基于车身垂直加速度、俯仰角加速度、侧倾角加速度以及悬架动挠度等关键参数。
在MATLAB/Simulink环境中,构建了四自由度半车主动悬架控制系统的仿真模型,对设计的控制器进行了验证。通过将ADAMS模型模块化导入MATLAB环境,实现了整车主动悬架的PID和Fuzzy-PID控制系统。对比分析表明,在50km/h的车速下,这两种控制方法都显著提升了行驶平顺性和动态特性,而Fuzzy-PID控制器的表现更为优秀。
论文的核心贡献在于展示了ADAMS和MATLAB联合仿真技术在主动悬架控制策略研究中的实用性和准确性,这对于提升汽车行驶性能和操控稳定性具有重要意义。此外,该研究也为其他汽车工程领域的主动控制系统设计提供了新的思路和方法。
关键词:汽车主动悬架、ADAMS联合仿真、PID控制、Fuzzy-PID控制、动态性能优化。这篇论文深入探讨了主动悬架控制策略的仿真方法和技术应用,对于提高车辆舒适性和安全性具有较高的研究价值。
三 峡 大 学 硕 士 学 位 论 文
9
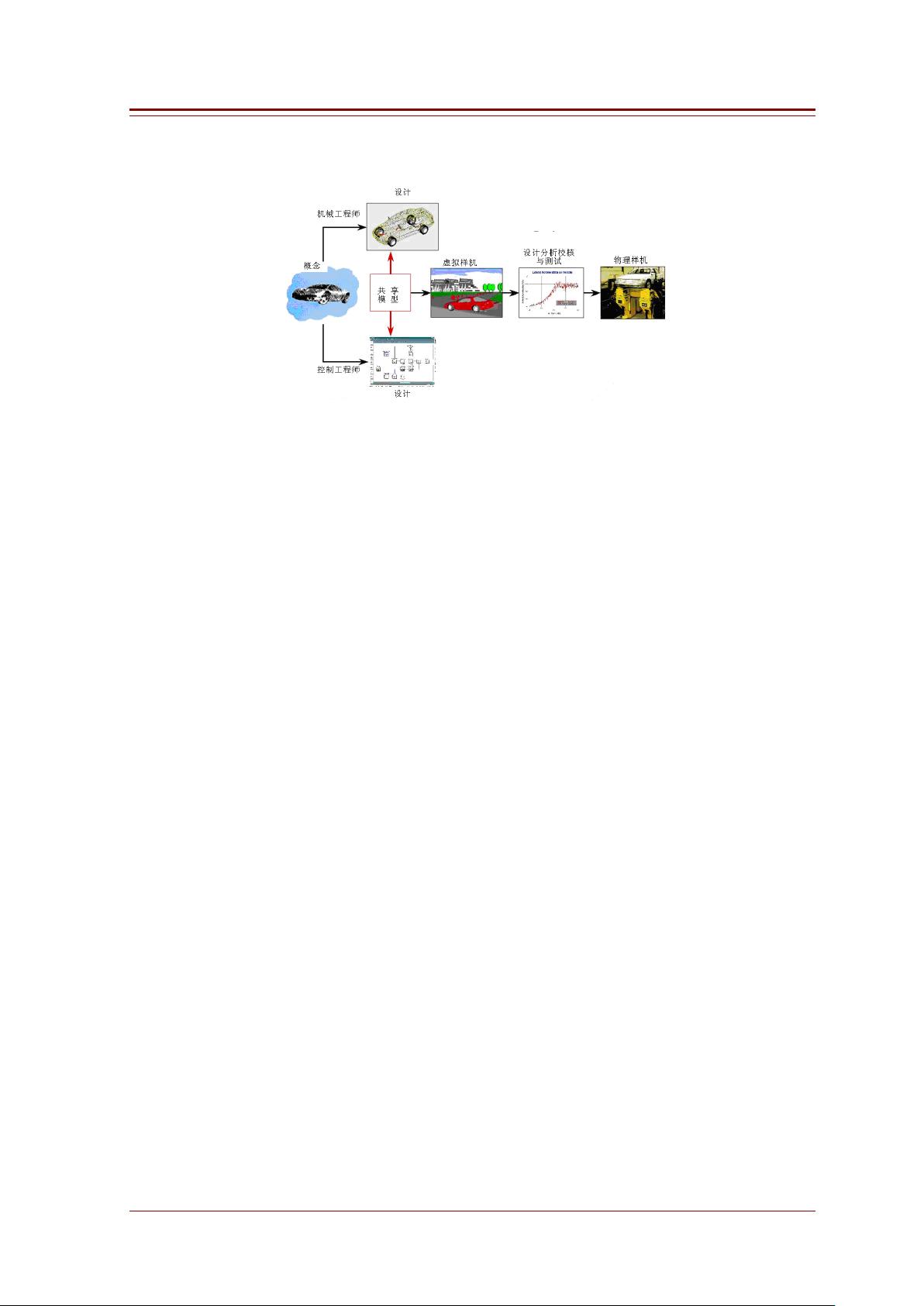
调试,使机械结构和控制系统采用同一个系统模型进行设计和仿真。
图 1.5 联合仿真流程
1.4 课题研究的主要内容
课题基于虚拟样机与 MATLAB 的车辆悬架系统主动控制技术研究,是拟应用虚
拟样机技术,选择车辆悬架这一典型机电系统为研究分析对象,以提高汽车平顺性为
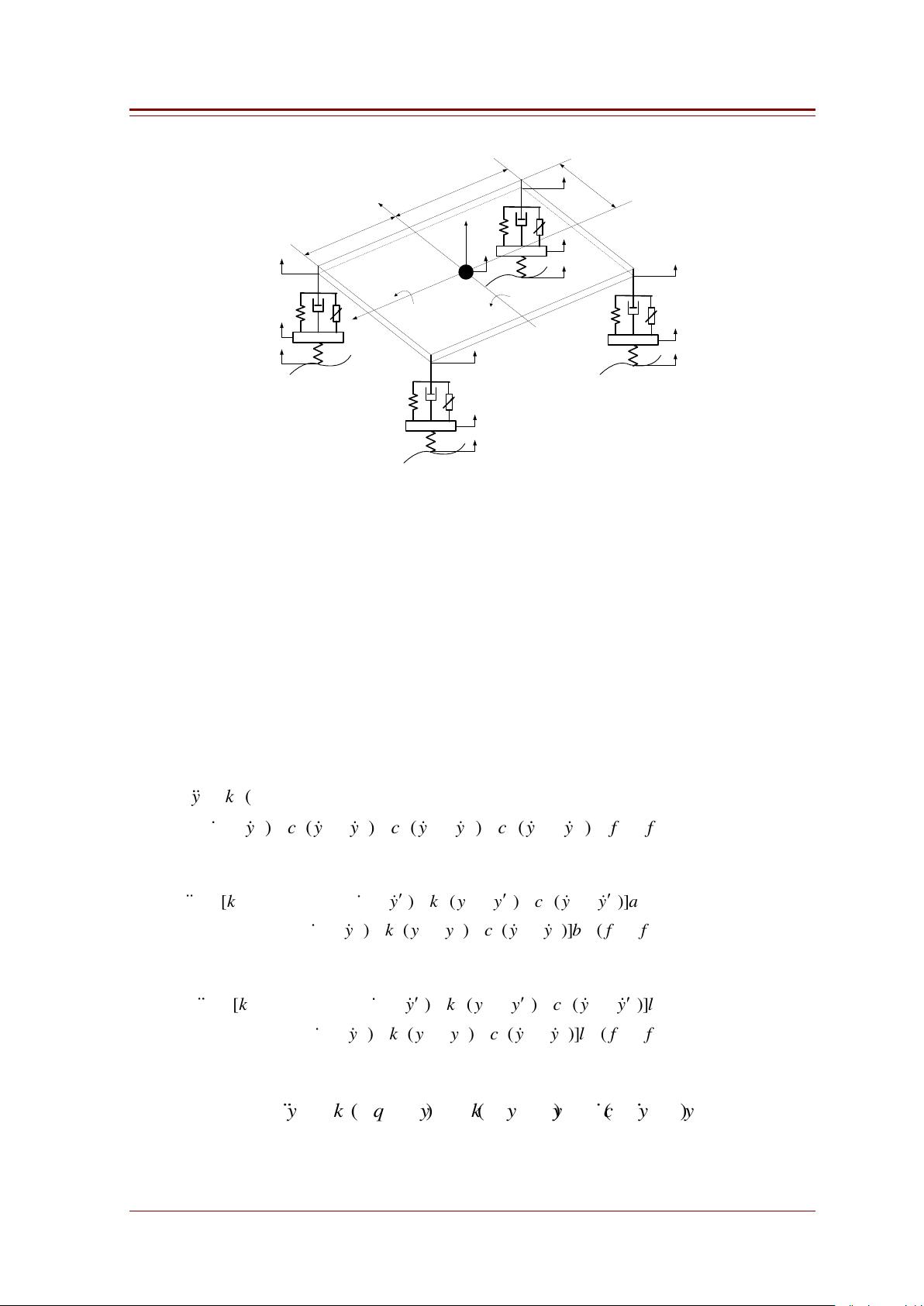
目标,对系统控制器进行设计与优化。假定车身是一个刚体,当车辆在水平面做匀速
直线运动时,车身具有上下跳动、俯仰、侧倾三个自由度;两个前轮分别具有垂直运
动的自由度;独立悬架的两个后轮具有两个垂向运动。这样构成了整车七自由度模型。
要完成课题的研究,必须逐步的完成以下内容和工作。
(1)通过分析悬架系统结构,建立系统简化的数学模型。
(2)明确约束条件及设计目标,确定系统设计参数,建立 ADAMS 环境下的隔
振系统多体动力学数字模型,建立双辄输入路面谱;仿真查看响应结果。
(3)设计主动隔振系统的控制系统,运用 MATLAB/Simulink 工具箱建立主动控
制系统(PID 控制系统、模糊 PID 控制系统)。
(4)在 MATLAB/Simulink 环境中建立四自由度半车主动悬架 PID 控制系统和
模糊 PID 控制系统模型,并进行仿真分析,验证所设计控制系统对悬架振动控制的有
效性。
(5)建立整车主动悬架的控制系统模型。通过将系统中部分机械结构模型传输
到 ADAMS 中进行多体建模并定义所需变量;通过 ADAMS 与 MATLAB 的接口,
将上述变量传输到 MATLAB/Simulink 模块中,在这个模块中对控制部门设计的控制
方案进行仿真,再将仿真结果传回 ADAMS 中分析数据结果,仿真比较几种控制方
式主动隔振系统的控制效果.
(6)给出本文的结论和研究建议。
剩余67页未读,继续阅读
2023-10-29 上传
2023-10-30 上传
2020-03-27 上传
2021-07-03 上传
2021-07-10 上传
2021-10-30 上传


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







