模拟进化:遗传算法在路径规划中的探索与应用
版权申诉
遗传算法及其在路径规划中的应用是现代控制科学与工程领域的一个重要研究课题,它起源于20世纪60年代的模拟进化优化方法。这种创新方法借鉴了生物进化论和自然遗传学的原理,如达尔文的物种竞争与适者生存原则以及孟德尔的遗传规律,将其应用于解决复杂的优化问题,特别是那些传统数学优化方法难以处理的情况。
遗传算法的核心在于模拟自然选择的过程,通过个体(即问题的参数编码,通常用二进制串表示,也称作染色体)的竞争和变异,实现种群(一组个体的集合)的演化。种群规模是指种群中个体的数量,它是遗传算法设计的关键参数之一,影响着搜索空间的探索效率。
在路径规划中,遗传算法的应用非常广泛。例如,对于机器人路径规划,它可以用来寻找从起点到终点的最优路径,考虑到障碍物避免、运动限制等因素,这些都可能转化为组合优化问题或者具有约束条件的非线性优化问题。遗传算法的随机搜索特性使其能够跳出局部最优,增加找到全局最优解的可能性。
参考资料提供了几本经典著作,如周德俭和吴斌的《智能控制》、李少远和王景成的《智能控制》、李人厚的《智能控制理论和方法》,以及王顺晃和舒迪前的《智能控制系统及其应用》,这些都是深入学习遗传算法和其在路径规划中应用的重要教材。
然而,尽管遗传算法具有显著的优势,如适应性强、全局优化能力,但它也存在一些挑战,如计算成本较高、收敛速度相对较慢等。随着计算机硬件和软件技术的快速发展,这些问题得到了一定程度的缓解。遗传算法作为一种强大的工具,已经在控制科学与工程,特别是在路径规划领域展现出了巨大的潜力和应用前景。
22/3/11 01:14
北京科技大学自动化学院控制科学与工程系
9
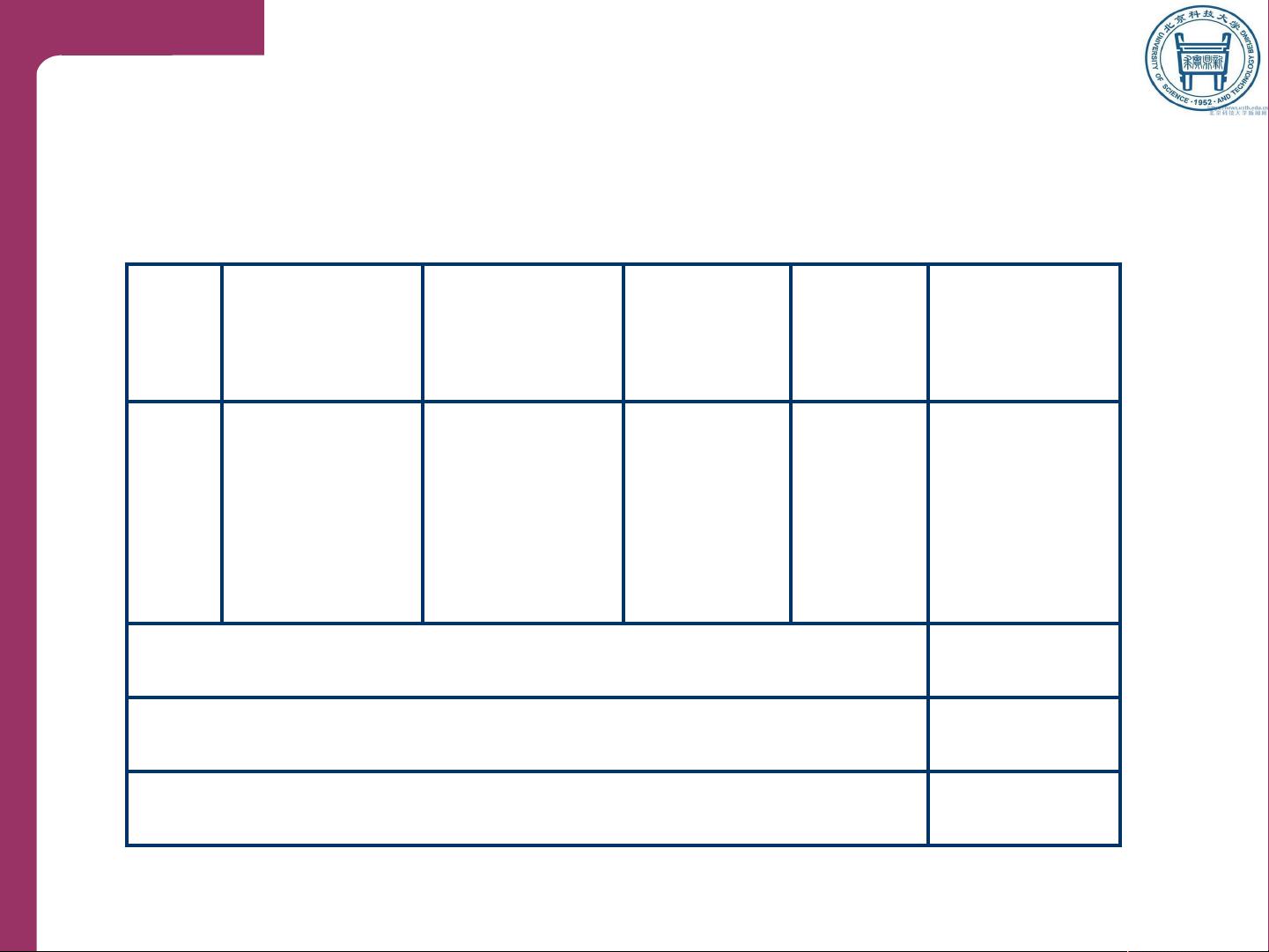
( 6 )变异
采用单点随机变异方式进行变异操作。
表 5 变异操作过程
标号
交叉后
的种群
1
01000
2
11001
3
11101
4
10010
总 计
平均值
最大值
新种群
01100
11001
11101
10010
f (x)=x
2
3
/
/
/
12
25
29
18
144
625
841
324
1934
483.5
841
变异点位置
x 值
剩余47页未读,继续阅读
2024-05-30 上传
2021-10-05 上传
2021-10-06 上传
2021-09-12 上传
2021-01-15 上传
2021-10-02 上传
2022-09-19 上传
2023-04-19 上传
2021-09-21 上传

一路向右
- 粉丝: 7
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
