FANUC ROBOGUIDE仿真软件操作指南
需积分: 50 165 浏览量
更新于2024-07-17
4
收藏 6.49MB PDF 举报
"发那科仿真软件应用汇编,包括FANUC的ROBOGUIDE使用,项目规划,机器人运动轨迹仿真,焊枪及TCP设置,变位机创建,机器人行走轴设定,以及变位机协调功能和外围设备的添加。"
在工业自动化领域,发那科(FANUC)的仿真软件ROBOGUIDE扮演着至关重要的角色,它允许用户在实际操作之前对机器人系统进行规划、仿真和验证。本资料详细介绍了如何有效地运用ROBOGUIDE进行各种操作。
首先,软件安装是基础。用户应按照指定步骤运行.\RoboguideV7.7\setup.exe完成安装,随后进行软件注册。这确保了软件的合法使用和功能完整性。
在项目规划阶段,ROBOGUIDE允许用户模拟机器人的运动轨迹,这对于优化工作流程和避免潜在碰撞至关重要。通过设置,用户可以创建机器人的运动轨迹动画,直观地看到机器人在工作空间中的动态行为。
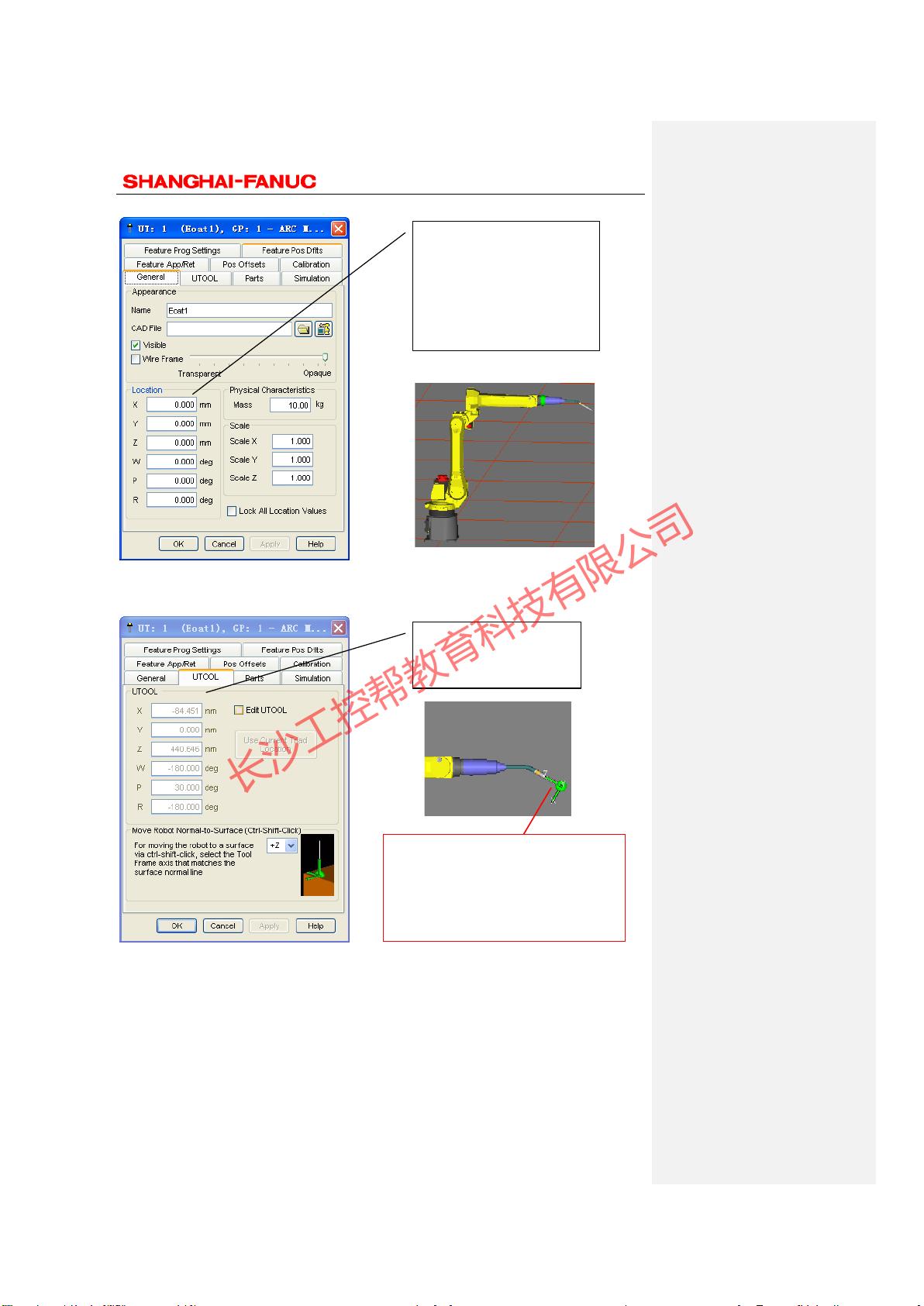
关于机器人配置,ROBOGUIDE提供了添加焊枪和TCP(Tool Center Point,工具中心点)的功能。焊枪的添加有助于模拟弧焊等焊接任务,而TCP设置则定义了机器人工具的实际作用点,对于精确控制机器人动作至关重要。
在变位机的创建部分,用户可以选择自建数模或利用模型库。自建模型提供了更大的灵活性,而模型库则包含预设的变位机配置,方便快速应用。变位机的协调功能包括单轴、双轴协调以及更复杂的DualArm设置,适应不同类型的工件搬运需求。
机器人行走轴的创建分为利用数据库模型和自建模型两种方式,扩展了机器人的移动范围,使其能在更大区域内作业。
此外,ROBOGUIDE还支持添加其他外围设备,如障碍物(Obstacles),这在仿真环境中用于模拟工作区域内的静态或动态物体,确保机器人安全运行。
最后,仿真录像的制作功能可以帮助用户记录和回放机器人的动作,以便于分析、展示或培训。
"发那科仿真软件应用汇编"是学习和掌握FANUC ROBOGUIDE的强大参考资料,涵盖了从基本操作到高级功能的全面指导,对于提升机器人系统的规划和仿真能力具有极大的价值。
上海发那科机器人有限公司
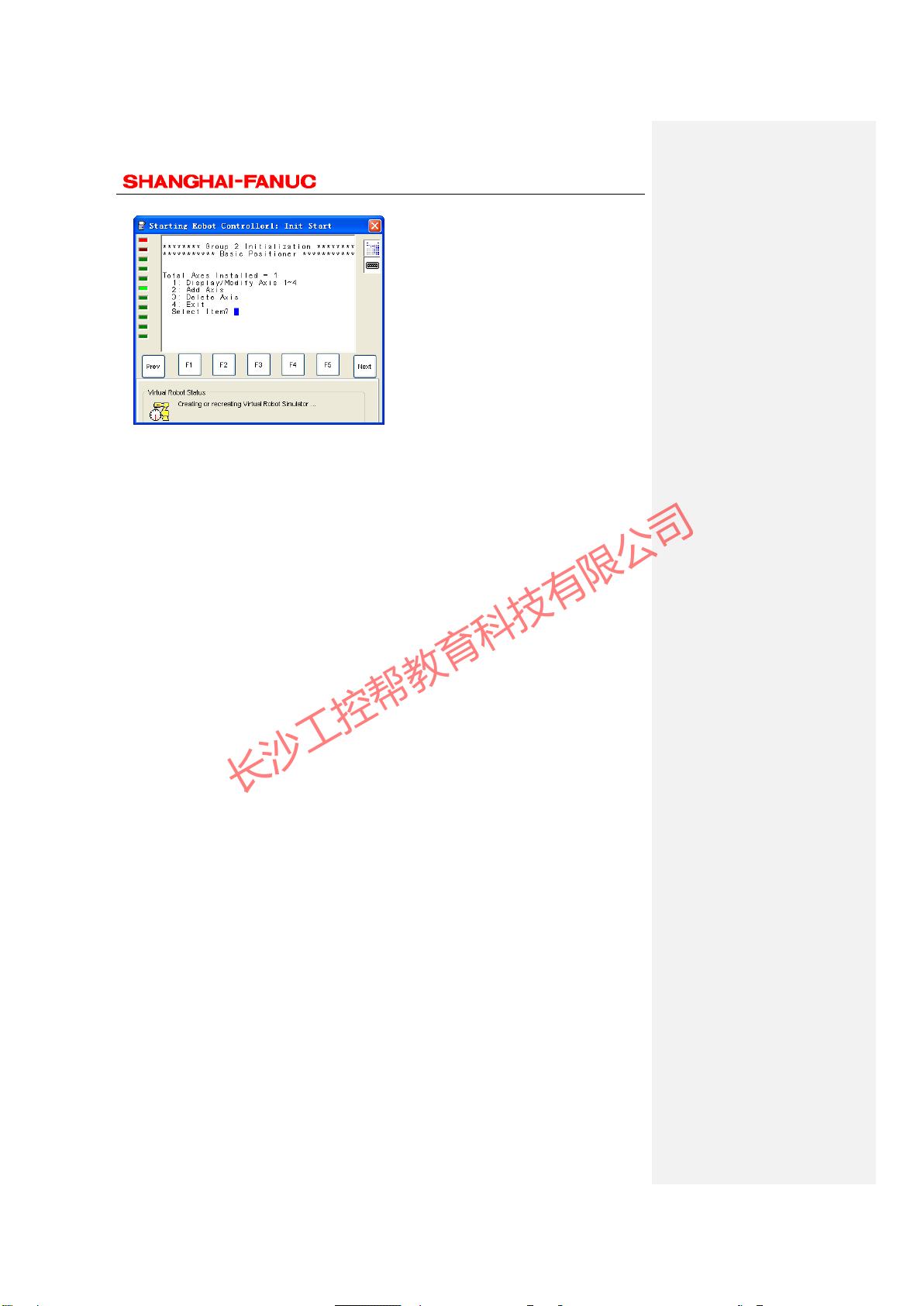
16
选 4 退出设置;
若以上设置有错误,请选 1 更改;
若需再添加一轴,可选 2 继续添加。
工控帮助教小舒QQ:2823408167
长沙工控帮教育科技有限公司



剩余104页未读,继续阅读
687 浏览量
1236 浏览量
425 浏览量
921 浏览量
3774 浏览量
1835 浏览量

JohnsonX1
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- StateEstimationforRobotics-CN.pdf.tar.gz
- Desktop,c语言火车票订票管理源码,c语言
- node-font-list:获取系统中安装的字体列表
- 菲尼克斯微型继电器手册.rar
- MICROMAKEL3+ 3ds chitubox插件
- Honeywell_hackathon
- developer-knowledge:独立的增强型知识项目分层清单,可以成为更好的软件开发人员。 标题
- h2gis,H2数据库的空间扩展。.zip
- NewtonJson.rar
- shell:一种用于IBM Cloud Functions and Composer的基于电子的开发工具
- 20210315-中国联通-通信行业:5G终端白皮书V4(2021年度).rar
- 单片机频率计仿真protues
- 情人节图标 .svg素材下载
- Android_Projects:我尝试学习Android开发时所做的旧项目
- 主题默认值:Hexsoftstudio CSS默认值
- Gestrue,安卓、安卓、安卓.zip
