现代控制系统的状态空间表达式和模拟结构图
需积分: 6 16 浏览量
更新于2024-07-25
收藏 3.9MB DOC 举报
"现代控制答案"
现代控制答案是指现代控制理论中的一些常见问题的答案,这些问题涵盖了控制系统的设计、分析和优化等方面。在这里,我们将对现代控制答案进行详细的解释和分析。
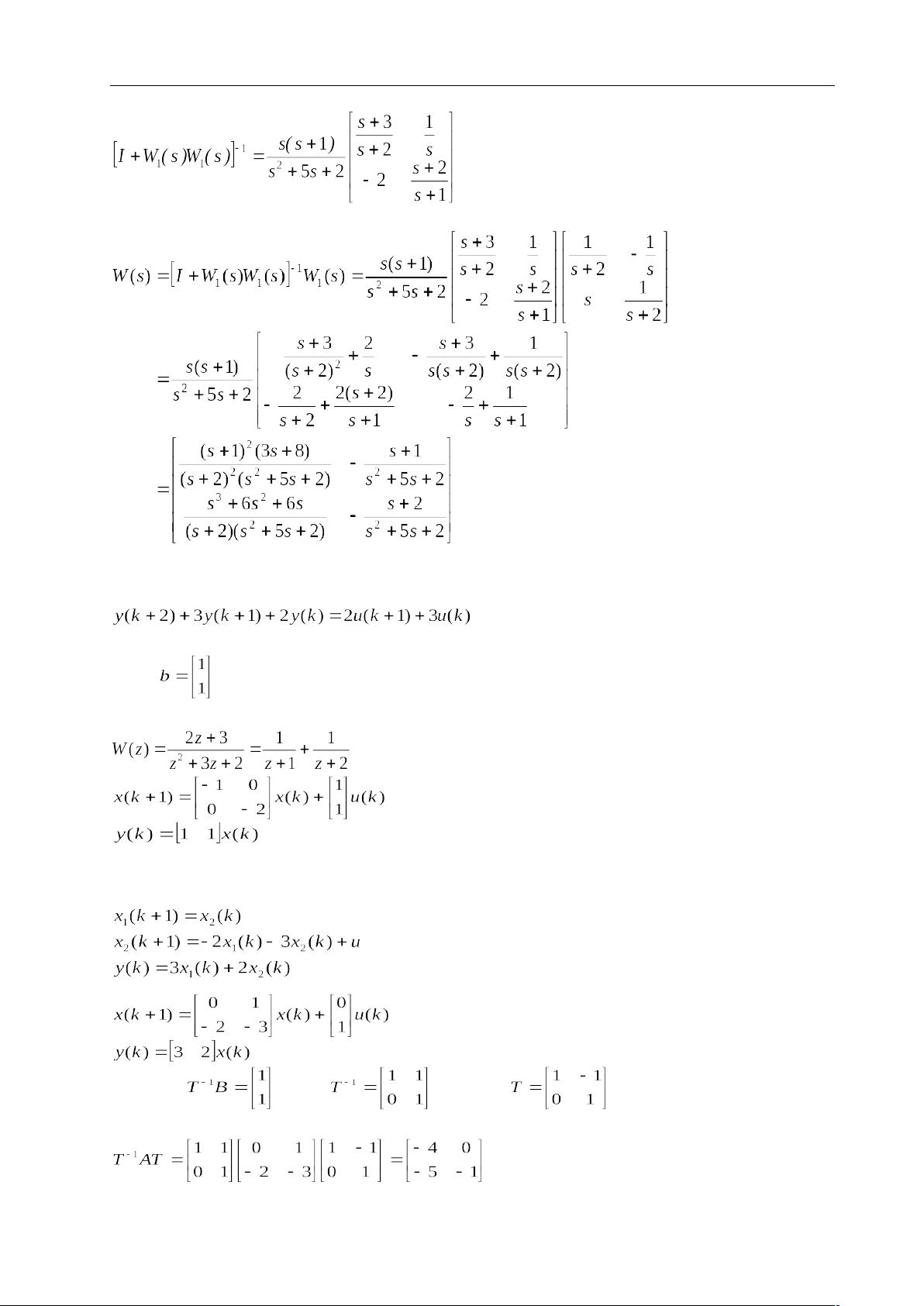
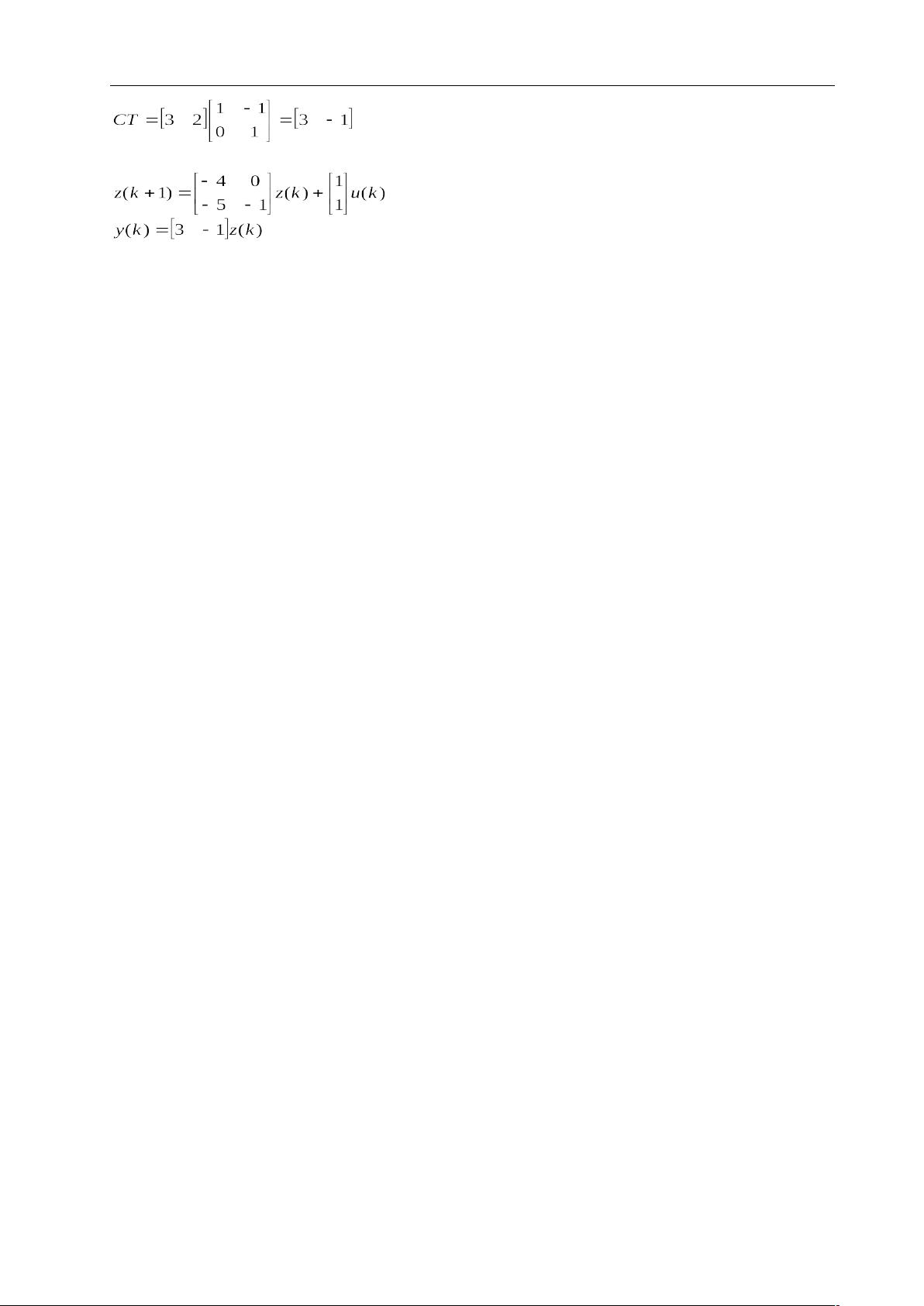
状态空间表达式
状态空间表达式是现代控制理论中的一种重要概念,它描述了控制系统的状态变量之间的关系。状态空间表达式通常可以写成以下形式:
dx/dt = Ax + Bu
y = Cx + Du
其中,x是状态变量,u是输入量,y是输出量,A、B、C、D是系数矩阵。
在现代控制答案中,我们可以看到许多关于状态空间表达式的问题,例如第一章习题答案1-1中,系统的状态空间表达式是:
dx/dt = Ax + Bu
y = Cx + Du
其中,A、B、C、D是系数矩阵,x是状态变量,u是输入量,y是输出量。
模拟结构图
模拟结构图是现代控制理论中的一种重要工具,它描述了控制系统的结构和工作原理。模拟结构图通常由信号流图、控制器、控制对象和反馈回路组成。
在现代控制答案中,我们可以看到许多关于模拟结构图的问题,例如第一章习题答案1-2中,系统的模拟结构图如下:
[pic]
其中,信号流图表示了系统的输入和输出,控制器表示了系统的控制算法,控制对象表示了系统的状态变量,反馈回路表示了系统的反馈机制。
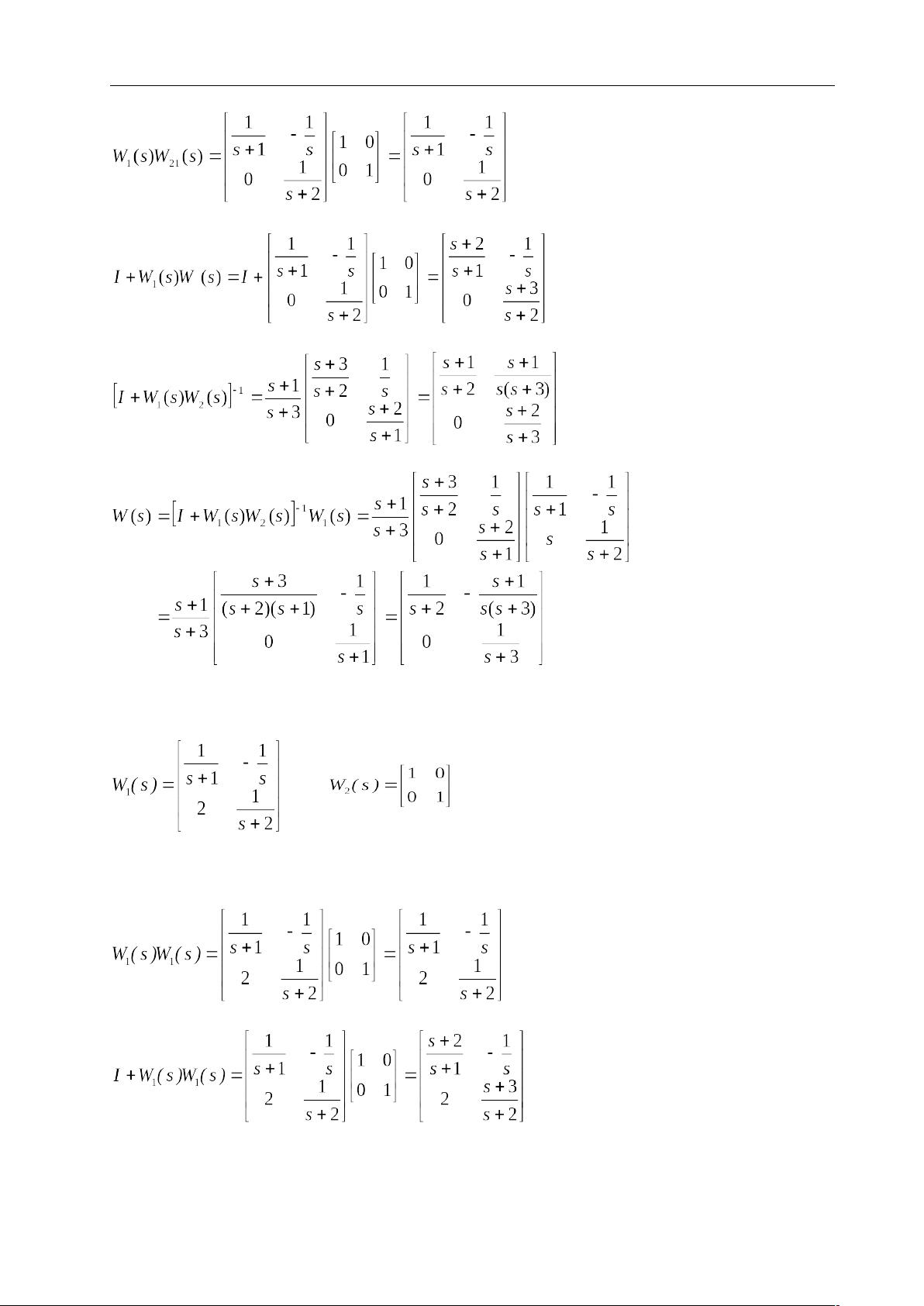
传递函数阵
传递函数阵是现代控制理论中的一种重要概念,它描述了控制系统的频率特性。传递函数阵通常可以写成以下形式:
G(s) = C(sI - A)^{-1}B + D
其中,G(s)是传递函数,C是输出矩阵,A是系统矩阵,B是输入矩阵,D是直接传递矩阵。
在现代控制答案中,我们可以看到许多关于传递函数阵的问题,例如第一章习题答案1-4中,系统的传递函数阵如下:
G(s) = C(sI - A)^{-1}B + D
其中,C、A、B、D是系数矩阵。
特征矢量
特征矢量是现代控制理论中的一种重要概念,它描述了控制系统的稳定性和可控性。特征矢量通常可以写成以下形式:
Ax = λx
其中,A是系统矩阵,λ是特征值,x是特征矢量。
在现代控制答案中,我们可以看到许多关于特征矢量的问题,例如第一章习题答案1-8中,系统的特征矢量如下:
Ax = λx
其中,A是系统矩阵,λ是特征值,x是特征矢量。
现代控制答案涵盖了控制系统的设计、分析和优化等方面,包括状态空间表达式、模拟结构图、传递函数阵和特征矢量等概念。这些概念是现代控制理论的基础,是控制工程师和研究人员必须掌握的知识。
2021-10-03 上传
2011-04-05 上传
2015-07-11 上传
2012-03-01 上传
2015-03-25 上传
2012-07-19 上传
2020-05-07 上传
2019-05-13 上传

aonantian
- 粉丝: 5
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
