2019 IEEE国际固态电路会议特辑:低功耗运动触发IoT CMOS图像传感器与能量效率
需积分: 10 48 浏览量
更新于2024-07-16
收藏 140.48MB PDF 举报
"这篇文档是IEEE固态电路期刊(Journal of Solid-State Circuits)的2019年11月刊,主要关注集成电路的晶体管级设计,特别是2019年国际固态电路会议(ISSCC)的特辑。文章经过同行评审,并在被接受前进行了抄袭检查。特辑包括了能源高效、数据压缩、可重构3D堆叠SPAD成像器等创新固态电路技术的论文。"
在固态电路领域,集成电路(IC)的设计是一个核心主题,它涉及将多个电子元件集成到一个单一的硅片上,以实现更小、更高效的功能。本文刊载的论文反映了这个领域的最新进展和技术挑战。例如,"Energy-Efficient Motion-Triggered IoT CMOS Image Sensor With Capacitor Array-Assisted Charge-Injection SAR ADC"探讨了一种能效高的物联网(IoT)CMOS图像传感器,其利用电容阵列辅助的电荷注入SAR ADC(逐次逼近型模数转换器),实现了在运动触发时的低功耗操作,这对于电池供电的IoT设备至关重要。
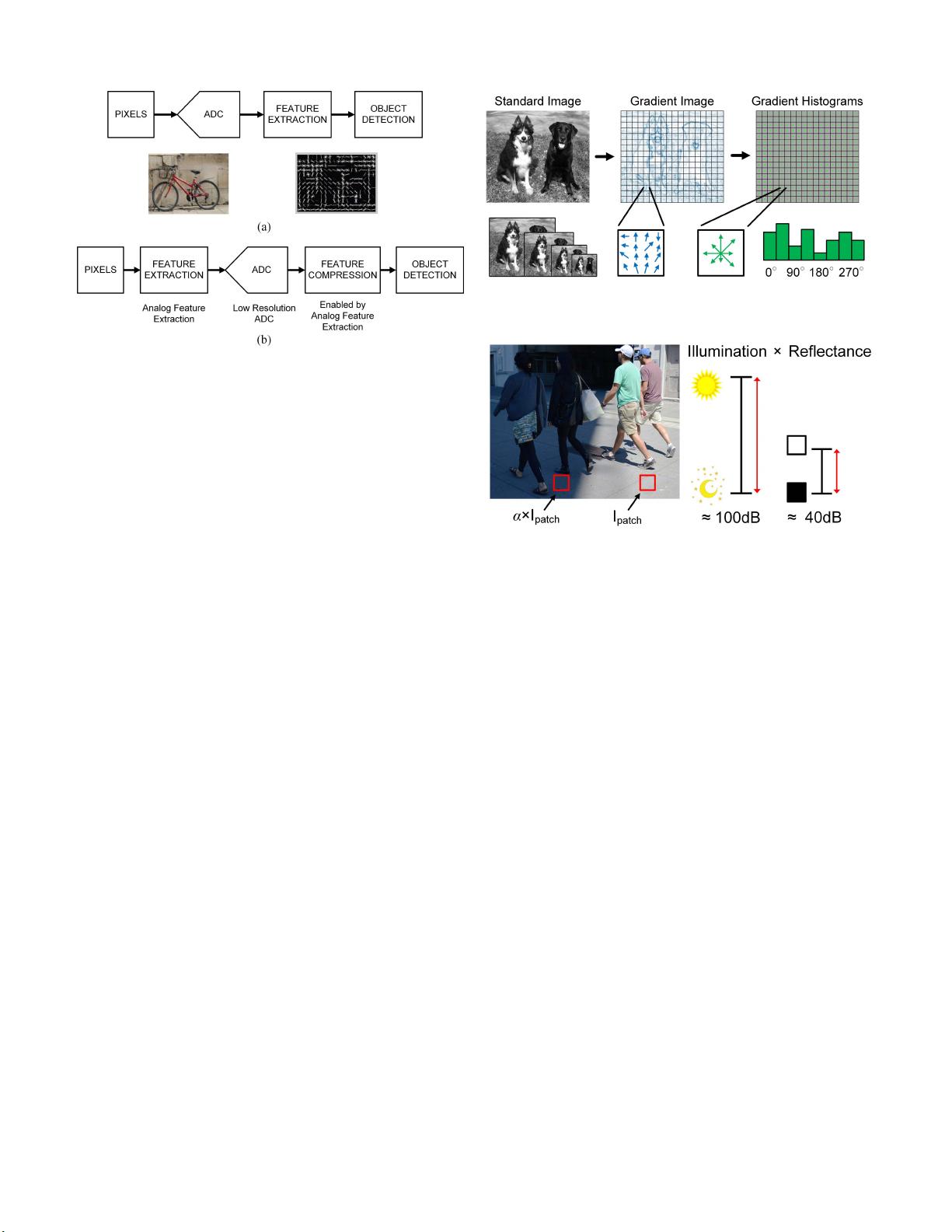
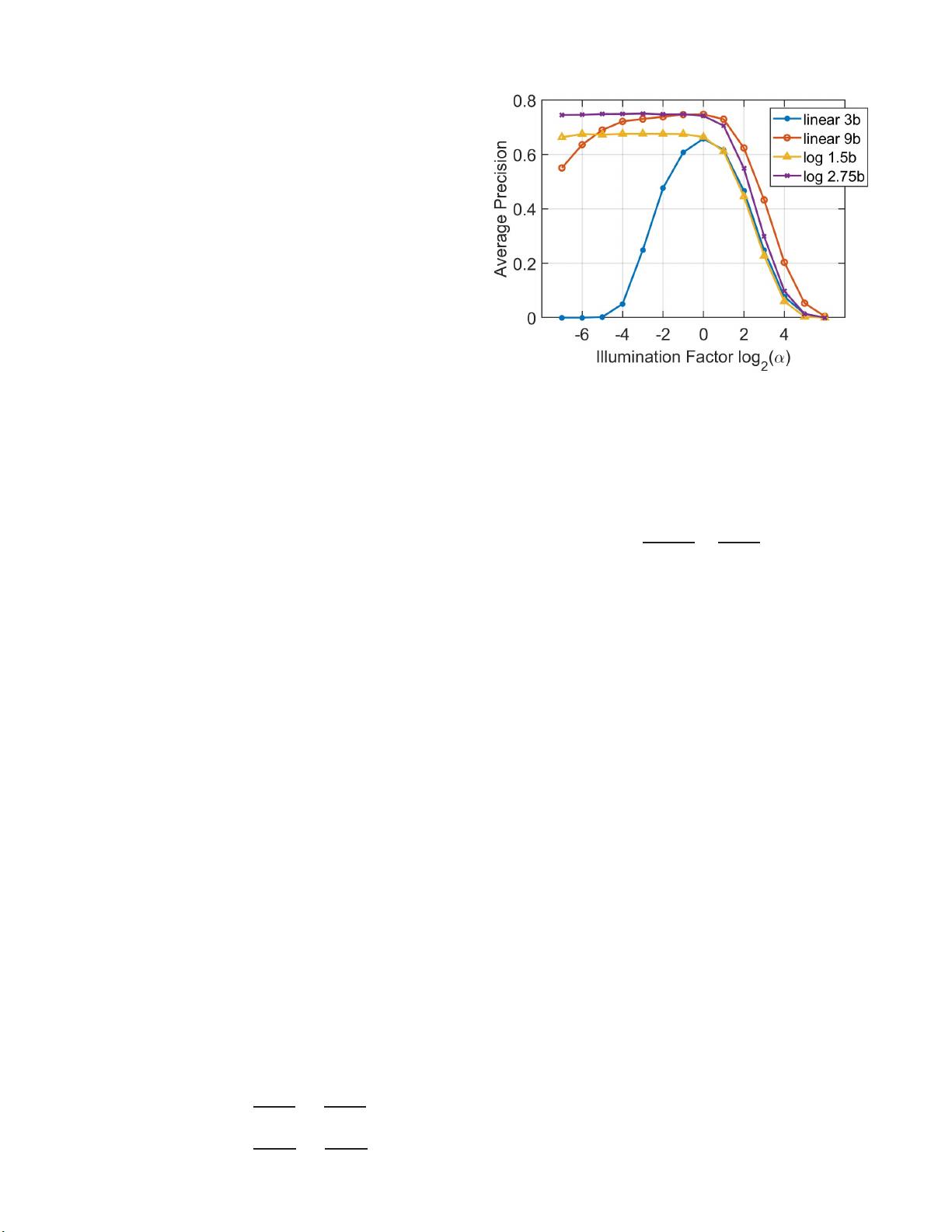
另一篇论文"A Data-Compressive 1.5/2.75-bit Log-Gradient QVGA Image Sensor With Multi-Scale Readout for Always-On Object Detection"介绍了一种数据压缩的1.5/2.75位对数梯度QVGA图像传感器,它具有多尺度读取功能,用于始终开启的目标检测。这种传感器能够在保持低功耗的同时,提供高效的图像处理,适合用于连续监测和物体识别的应用。
"Reconfigurable 3-D-Stacked SPAD Imager With In-Pixel Histogramming for Flash LIDAR or High-Speed Time-of-Flight Imaging"提出了一种可重构的3D堆叠SPAD(单光子雪崩二极管)成像器,内置像素级直方图,适用于闪存激光雷达或高速飞行时间成像。这种创新设计提高了3D传感的速度和精度,对于自动驾驶汽车和其他需要精确距离测量的系统具有重要意义。
最后,"A 512-Pixel, 51-kHz-Frame-Rate, Dual-Shank, Lens-Less, Filter-Less Single-Photon Avalanche Diode CMOS Neural Imaging Probe"介绍了一种512像素、51kHz帧率的双分支、无镜头、无滤波的单光子雪崩二极管CMOS神经成像探针。这种探针用于高分辨率的神经科学应用,它能够实现无损的神经活动记录,对于理解大脑功能和开发新的神经接口技术具有重大价值。
这些论文展示了固态电路技术在能源效率、数据处理、传感器设计和生物医学应用等方面的突破,突显了该领域的创新活力和未来潜力。通过这样的同行评审出版物,科研人员和工程师可以分享最新的研究成果,推动固态电路技术的发展。
2930 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 54, NO. 11, NOVEMBER 2019
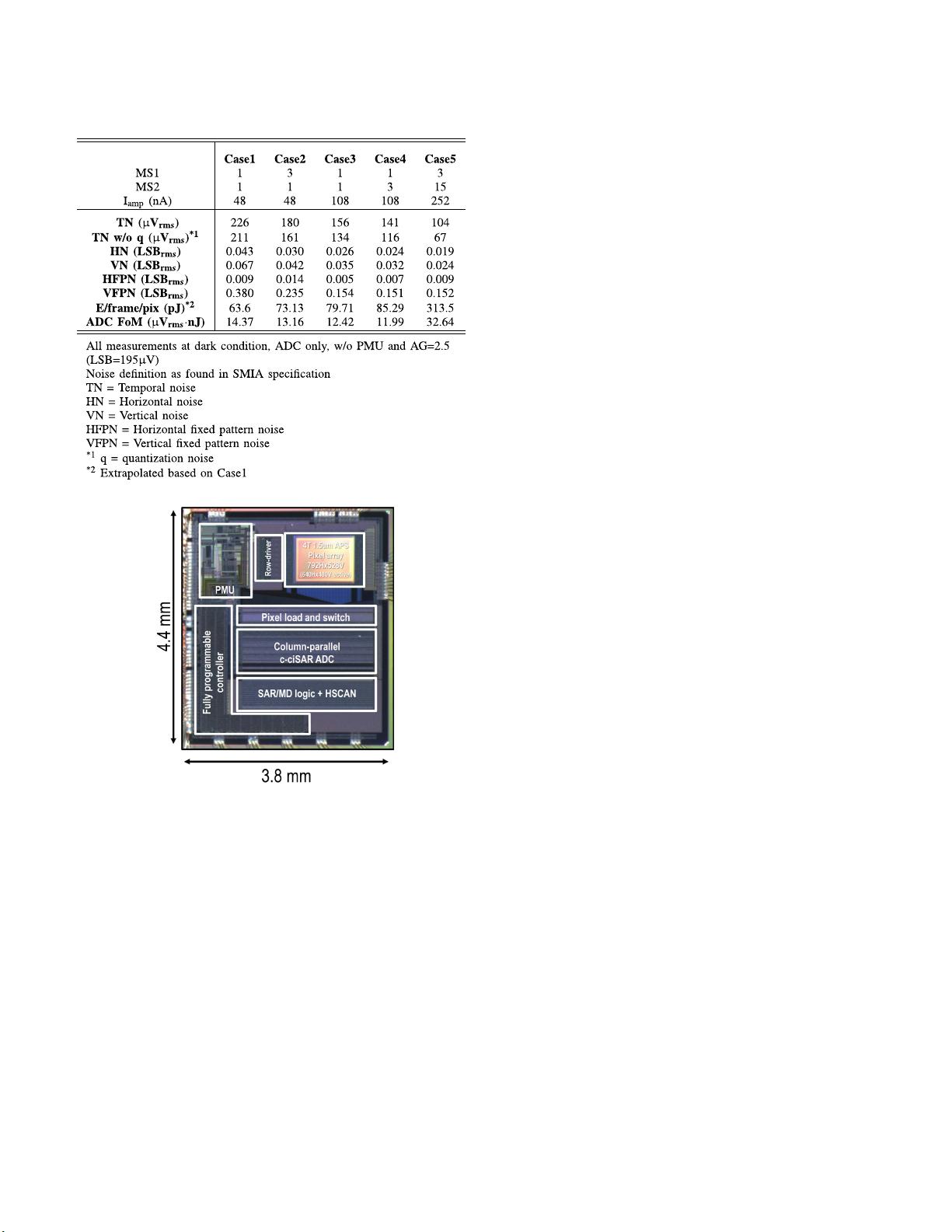
TABLE III
I
MAGE CHARACTERISTICS
Fig. 16. Chip photograph.
pitch pixel array is selected for future integration of a small-
form lens. The sensor is designed with thick-oxide devices
to reduce leakage current except for column SAR logic. The
ADC pitch and size can be further reduced with using high-vt
thin-oxide devices if available. Also, the sensor can operate
with its on-chip PMU, which generates 13 intern al voltages
from the external 2.5-V battery, enabling integration into an
IoT sensor node. The total die area is 16.7 mm
2
.
VI. C
ONCLUSION
In this article, an IoT image sensor is proposed that is
designed with energy-efficient c-ciSAR ADCs in column-
parallel form. The c-ciSAR achieves 10b performance while
only consuming 63.6 pJ/frame/pix, which yields the state-of-
the-art energy efficiency of 14.4-μV
rms
·nJ ADC FoM. Also,
the sensor contains motion-triggering function implemented
with the near-pixel placement of previous frame data. This
is done while re-using the ADC hardware already in place
for c-ciSAR, which leads to a more hardware/energy-efficient
solution than other sensors while maintaining high image
quality (64.1 dB in dynamic range).
A
CKNOWLEDGME NT
The authors would like to thank Synopsys for their tools.
R
EFERENCES
[1] G. Kim et al., “A 467 nW CMOS visual motion sensor with temporal
av eraging and pixel aggregation,” in IEEE Int. Solid-State Circ uits Conf.
(ISSCC) Dig. Tech. Papers, Feb. 2013, pp. 480–481.
[2] O. Kumagai et al., “A 1/4-inch 3.9 Mpixel low-power event-driven
back-illuminated stacked CMOS image sensor,” in IEEE Int. Solid-State
Circuits Conf. (ISSCC) Dig. Tech. Papers, Feb. 2018, pp. 86–88.
[3] K. D. Choo, J. Bell, and M. P. Flynn, “Area-efficient 1 GS/s 6b SAR
ADC with charge-injection-cell-based DAC,” in IEEE Int. Solid-State
Circuits Conf. (ISSCC) Dig. Tech. Papers, Jan./Feb. 2016, pp. 460–461.
[4] S. Kawahito, “Column-parallel ADCs for CMOS image sensors and their
FoM-based evaluations,” IEICE Trans. Electron., vol. E101.C, no. 7,
pp. 444–456, Jul. 2018.
[5] P. Harpe, E. Cantatore, and A. V. Roermund, “A 2.2/2.7 fJ/conversion-
step 10/12b 40 kS/s SAR ADC with data-driven noise reduction,”
in IEEE Int. Solid-State Circuits Conf. (ISSCC) Dig. Tech. Papers,
Feb. 2013, pp. 270–271.
[6] C. Liu, S. Chang, G. Huang, and Y. Lin, “A 0.92 mW 10-bit 50-MS/s
SAR ADC in 0.13 μm CMOS process,” in Proc. Symp. VLSI Circuits,
Jun. 2009, pp. 236–237.
[7] L. Kull et al., “A 90 GS/s 8b 667 mW 64× interleaved SAR ADC
in 32 nm digital SOI CMOS,” in IEEE Int. Solid-State Circuits Conf.
(ISSCC) Dig. Tech. Papers, Feb. 2014, pp. 378–379.
[8] R. Funatsu et al., “133 Mpixel 60 fps CMOS image sensor with
32-column shared high-speed column-parallel SAR ADCs,” in IEEE
Int. Solid-State Circuits Conf. (ISSCC) Dig. Tech. Papers, Feb. 2015,
pp. 1–3.
[9] H. Kim et al., “A delta-readout scheme for low-po wer CMOS image
sensors with multi-column-parallel SAR ADCs,” IEEE J. Solid-State
Circuits, vol. 51, no. 10, pp. 2262–2273, Oct. 2016.
[10] J. P. Keane et al., “An 8 GS/s time-interleaved SAR ADC with
unresolved decision detection achieving -58 dBFS noise and 4 GHz
bandwidth in 28 nm CMOS,” in IEEE Int. Solid-State Circuits Conf.
(ISSCC) Dig. Tech. Papers, Feb. 2017, pp. 284–285.
[11] P. Harpe, “A 0.0013 mm
2
10b 10 MS/s SAR ADC with a 0.0048 mm
2
42 dB-rejection passive fir filter,” in IEEE Int. Solid-State Circuits Conf.
(ISSCC) Dig. Tech. Papers, Apr. 2018, pp. 1–4.
[12] S. Ji, J. Pu, B. C. Lim, and M. Horowitz, “A 220 pJ/pixel/frame CMOS
image sensor with partial settling readout architecture,” in Proc. IEEE
Symp. VLSI Circuits (VLSI-Circuits), Jun. 2016, pp. 1–2.
[13] L. Chen, X. Tang, A. Sanyal, Y. Yoon, J. Cong, and N. Sun,
“A 0.7-V 0.6-μW 100-kS/s low-po wer SAR ADC with statistical
estimation-based noise reduction,” IEEE J. Solid-State Circuits, vol. 52,
no. 5, pp. 1388–1398, May 2017.
[14] S.-E. Hsieh and C.-C. Hsieh, “A 0.4 V 13b 270 kS/S SAR-ISDM ADC
with an opamp-less time-domain integrator ,” in IEEE Int. Solid-State
Circuits Conf. (ISSCC) Dig. Tech. Papers, Feb. 2018, pp. 240–242.
[15] L. Kull et al., “A 10b 1.5 GS/s pipelined-SAR ADC with background
second-stage common-mode regulation and offset calibration in 14 nm
CMOS FinFET,” in IEEE Int. Solid-State Circuits Conf. (ISSCC) Dig.
Tech. Papers, Feb . 2017, pp. 474–475.
[16] T. Takahashi et al., “A stacked CMOS image sensor with array-
parallel ADC architecture,” IEEE J. Solid-State Circuits, vol. 53, no. 4,
pp. 1061–1070, Apr. 2018.
[17] T. Haruta et al., “A 1/2.3 inch 20 Mpixel 3-layer stacked CMOS image
sensor with DRAM,” in IEEE Int. Solid-State Cir cuits Conf. (ISSCC)
Dig. Tech. Papers, Feb. 2017, pp. 76–77.
[18] S. Sukegawa et al., “A 1/4-inch 8 Mpixel back-illuminated stacked
CMOS image sensor,” in IEEE Int. Solid-State Circuits Conf. (ISSCC)
Dig. Tech. Papers, Feb. 2013, pp. 484–485.
[19] A. Suzuki et al., “A 1/1.7-inch 20 Mpixel back-illuminated stacked
CMOS image sensor for ne w imaging applications,” in IEEE Int. Solid-
State Circuits Conf. (ISSCC) Dig. Tech. Papers, Feb . 2015, pp. 1–3.


剩余327页未读,继续阅读
2020-11-15 上传
2020-02-08 上传
2020-02-08 上传
2020-02-08 上传
2020-02-08 上传
2020-02-08 上传
2020-02-08 上传
2020-02-08 上传
2020-02-08 上传

netshell
- 粉丝: 11
- 资源: 185
 我的内容管理
展开
我的内容管理
展开







最新资源
- Vue3Firebase
- Amazon Data Scraper - Price, Product, Sales-crx插件
- 应用做事
- pandas_flavor-0.3.0.tar.gz
- Psd2Xcode-Xample:Psd2Xcode的示例文件和项目
- tcp_server_client:精简的C ++ TCP客户端服务器
- 【IT十八掌徐培成】计算机基础第01天-02.进制转换-cpu亲和力设置.zip
- SirinlerProje2
- QR马上读-crx插件
- 体内DNA随机动力学
- LostIRC-开源
- 满足您所有开发需求的简短Python代码段-Python开发
- scala-jsonschema:Scala JSON模式
- 155386sy.github.io
- OraNetted-开源
- pandas_flavor-0.2.0.tar.gz
