智能加工系统调度:多原则与蒙特卡洛模拟研究
需积分: 0 55 浏览量
更新于2024-06-30
2
收藏 1.05MB PDF 举报
"该文研究了基于多原则比较和蒙特卡洛模拟的RGV(Rail Guided Vehicle,轨道引导式车辆)动态调度模型,应用于一个由8台CNC(Computer Numerical Control,计算机数控)机床和1辆RGV组成的智能加工系统。文章探讨了单工序和双工序两种作业流程的调度策略,结合机器学习思想,通过模拟方法寻找局部最优解。"
正文:
在现代工业生产中,动态调度是提高生产效率和优化资源利用率的关键环节。该文针对由8台CNC机床和1辆RGV构成的智能加工系统,提出了一种综合规划模型、多原则求解和蒙特卡洛模拟的动态调度模型。在这一模型中,作者考虑了RGV在CNC间的运动、物料加工、上下料过程、清洗作业等多个生产环节,确保了物料加工与运送的唯一性。
对于单工序作业流程,研究中采用了“就近原则”、“FIFO原则”(先进先出)和“HRRN原则”(高等待时间优先),通过模拟方法分别求解。这三种原则得出的调度方案虽然有所不同,但都能有效调度RGV,其中第三组数据的系统效率最高,达到49.125件/h,体现了调度的有效性。
当作业流程升级为双工序时,问题变得更加复杂,因为CNC可能需要执行不同的工序,且工序布局具有不确定性。对此,文章对256种可能的工序布局进行了遍历,结合三种原则寻找最优分配。结果表明,不同原则在不同情境下表现各异,但都能找到相对高效的解决方案,且所有调度方案呈现出规律性的循环状态。
为了进一步优化调度,论文还引入了基于蒙特卡洛的学习算法,通过尝试和反馈机制,探索更接近全局最优的调度策略。这种机器学习方法能够在保持正反馈的同时,随机尝试以获取更好的解决方案,从而验证了所提出的调度模型的灵活性和适应性。
这篇论文通过构建多原则比较和蒙特卡洛模拟相结合的动态调度模型,对智能加工系统的调度问题进行了深入研究。它不仅为实际生产提供了理论依据,也为未来类似复杂系统的优化调度提供了新的思路和方法。同时,该研究强调了机器学习在解决复杂调度问题中的潜力,为工业4.0背景下的智能制造提供了一种有效的工具。
8
假若,当 RGV 到达 CNC 正前方时,所有 CNC 都在忙,则等待数秒,直到
出现上述情况。
Step 2.
计算 RGV 从当前位置到各台候选 CNC 的“时间代价函数”()。假若此时
RGV 处于位置,候选 CNC 处于位置。则:
()=
+
()
+
比较所有候选 CNC 的“时间代价函数”,并选取min{
()};最小值所对应
的 CNC,即为 RGV 的下一个操作对象。
根据“就近原则”,RGV 每次选择的都是一个“移动-上下料-清洗”过程时
间最短的 CNC。这样,其他 CNC 在等待过程中虚耗的时间也是最短的,从而可
以提高加工效率,加工更多的物料。
(2)“FIFO 原则”
当 RGV 完成一次清洗过程,处于空闲状态时,遍历此时所有 CNC 的等待
时间。选取等待时间最长的 CNC,作为 RGV 的下一个操作对象。
若此时所有的 CNC 都在忙,则利用(1)“就近原则”进行选择。
根据“FIFO 原则”,RGV 每次选择的都是已经等待时间最长的 CNC;及时
前往这样长期等待的 CNC 进行上下料,显然有助于减少它虚耗的时间,从而可
以提高加工效率,加工更多的物料。
(3)“HRRN 原则”
借鉴操作系统的调度原则,我们构造了“HRRN 原则”。
当 RGV 完成一次清洗过程,处于空闲状态时,遍历 RGV 至所有 CNC 的响
应比:
响应比 =
等待时间 +时间代价函数
时间代价函数
其中,“等待时间”指该时刻各个 CNC 已等待时间,“时间代价函数”指().
选择所有 CNC 的响应比中的最大值。事实上,“HRRN”原则综合考虑了“就近
原则”和“FIFO”原则:当时间代价函数一定时,等待时间越长越容易入选;当
等待时间一定时,时间代价函数越小越容易入选。
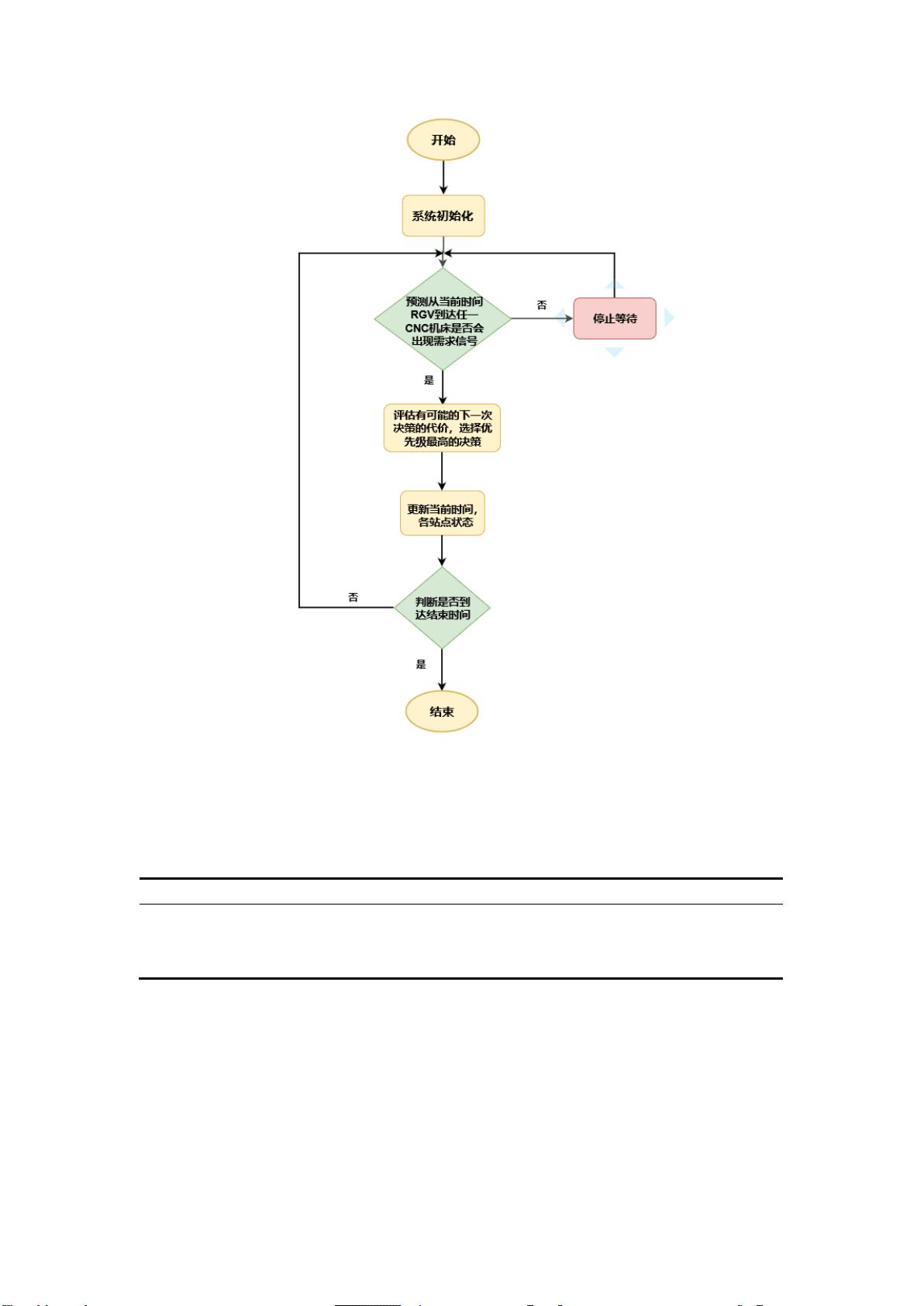
在编写算法时,模拟的具体细节遵照 4.1.2 规划中的各项约束条件,包括单
个物料加工过程、“上下料”手爪旋转过程、清洗作业过程等。算法的外部框架,
则需要依次考虑:
①当 RGV 空闲时,RGV 是停止等待还是移动;
②如果 RGV 停止等待,等待多长时间;
③如果 RGV 移动,移动到哪一台 CNC。
具体如下流程图所示。
剩余44页未读,继续阅读
2019-03-03 上传
2019-09-21 上传
2018-03-21 上传
2019-12-26 上传
2022-08-03 上传
2018-05-22 上传
187 浏览量
2020-07-07 上传
2023-07-14 上传

莉雯Liwen
- 粉丝: 29
- 资源: 305
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
