全向轮三轮机器人控制系统设计与分析
"全向轮机器人三轮结构控制主要探讨了三轮结构设计的数学模型以及控制策略,包括直线运动、原地旋转和可能的切线运动。此外,还提到了用于控制和感知的电子设备,如控制器、电机末端码盘、陀螺仪、加速度计、光电管和CCD。"
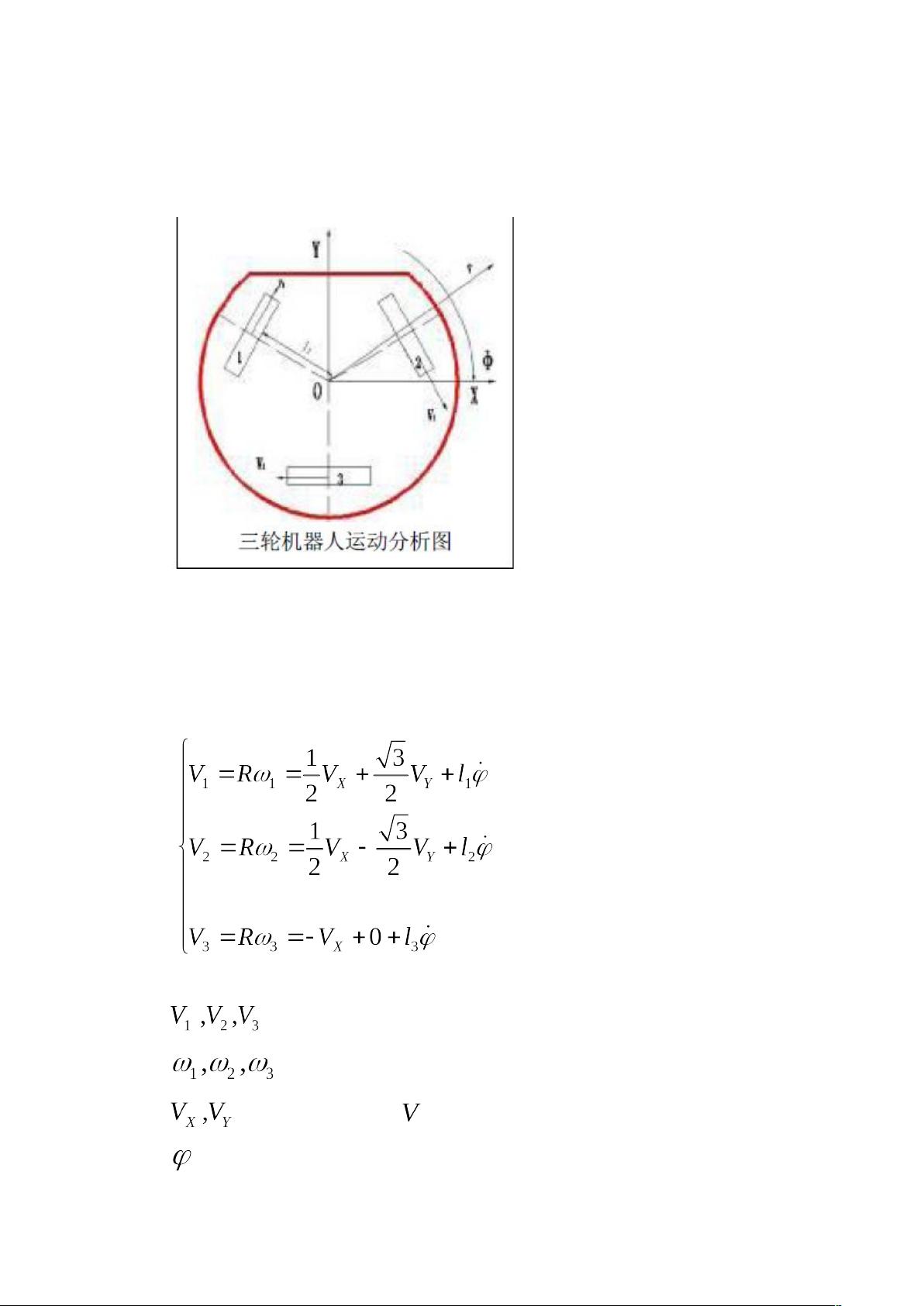
全向轮机器人的三轮结构设计是一种常见的移动平台,其灵活性在于能够实现全方位的移动。数学模型是理解这种控制的基础,通过运动合成与分解原理,可以建立车体运动与驱动轮运动之间的关系。在这个模型中,车体的运动由三个驱动轮的线速度和转动角决定。车轮的半径(R)和车体几何中心到车轮中心的距离([pic])是关键参数。
1. 直线运动:当机器人沿任意方向直线移动时,其自转角速度[pic]为0,意味着机器人仅做平动。两种特殊情况是沿X轴和Y轴的直线运动。沿X轴移动时,理论上Vx不等于0,Vy等于0;沿Y轴移动时,Vx等于0,Vy不等于0。在实际操作中,如何避免旋转并确保正确速度分配是需要解决的问题。
2. 原地旋转:机器人原地旋转时,三个驱动轮的速度组合可以产生旋转,公式[pic]描述了这一过程。
3. 切线运动:虽然文本中没有详细展开,但切线运动通常涉及机器人沿着特定路径或轨迹移动,这需要更复杂的控制策略。
控制思想部分提到了多种电子设备的作用:
1. 控制器:通常包含PID控制,用于限制最大速度并通过PWM(脉宽调制)调节电机速度,同时可以进行通讯调整最大速度。
2. 电机末端码盘:提供反馈信息,帮助控制器精确控制电机转动。
3. 陀螺仪:测量车体相对于外部坐标系的角度,确保定位精度。
4. 光电管:用于检测地面的标记,辅助路径跟踪,减少大误差。
5. CCD(电荷耦合器件):进一步清除累积误差,提高定位和导航的准确性。
在实际应用中,PID控制与PWM的结合使用可以实现精细的速度控制,而各种传感器的集成则有助于提高机器人的自主导航能力,减少定位误差。这些技术和理论对于全向轮机器人的设计和控制至关重要。
三轮结构设计
一. 数学模型
图一
选择固定在车体的坐标系(车体坐标系)XOY,如图一所示:
根据运动合成与分解原理,车体的运动和驱动轮的运动之间的运
动关系如下:
: 三组驱动轮转动的线速度。
: 分别是三组驱动轮的转动角。
: 机器人平移速度 在机器人车体坐标系下 X 和 Y 轴的分量。
:机器人自传的角速度。
下载后可阅读完整内容,剩余3页未读,立即下载
490 浏览量
点击了解资源详情
点击了解资源详情
2846 浏览量
379 浏览量
490 浏览量
228 浏览量
129 浏览量
2023-07-15 上传

woshijiaodade
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 第33课
- 行业分类-设备装置-一种扩散性纸张增湿设备.zip
- 电子发票管理系统 衡德电子发票台账 v2.4
- qle:QMK徽标编辑器
- sEMG_Basic_Hand_movements:sEMG 基本手部运动的 Matlab 代码-matlab开发
- 立体像对的空间前方交会-点投影系数法+共线方程严密法(C# winform)
- 塔夫
- ImDisk Toolkit:Windows 版 Ramdisk 和映像文件的挂载-开源
- weatherForcast
- 行业分类-设备装置-一种承托、贴靠式安装的装配式墙体.zip
- 贷款合同管理 宏达贷款合同管理系统 v1.0
- shopping-list-modules-day
- psiat1
- Meross:研究Meross MSS310智能插头
- apache-maven-3.6.3-bin
- Eduonix-[removed]JavaScript游乐场,该资源库探索了不同的JS组件,功能以及如何使工具直观
